




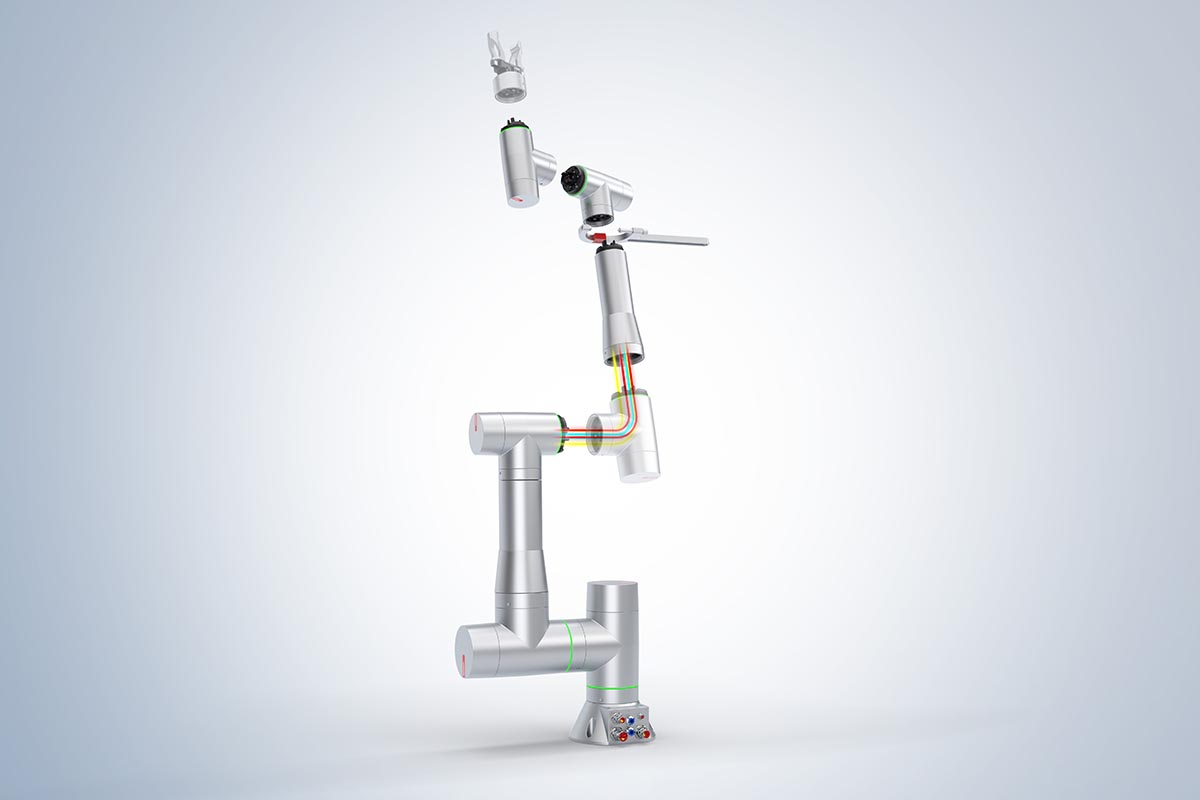
倍福推出的新型 ATRO 系统是一款模块化的工业机器人系统,可以根据不同的应用需求灵活组合,组装成造型最为匹配的机器人。集成驱动功能的标准电机模块,加上各种形状设计和长度的连接模块,可以实现近乎无限的机械组合。控制设备完全集成在整个 TwinCAT 控制平台中,因此可以直接使用各种成熟的自动化功能。
ATRO 模块化机器人为用户自己组装满足个性化应用需求的机器人开辟了各种可能,如:
- 集成动力系统的单轴旋转分度台
- 双轴跟踪装置
- 三轴 Delta 机器人
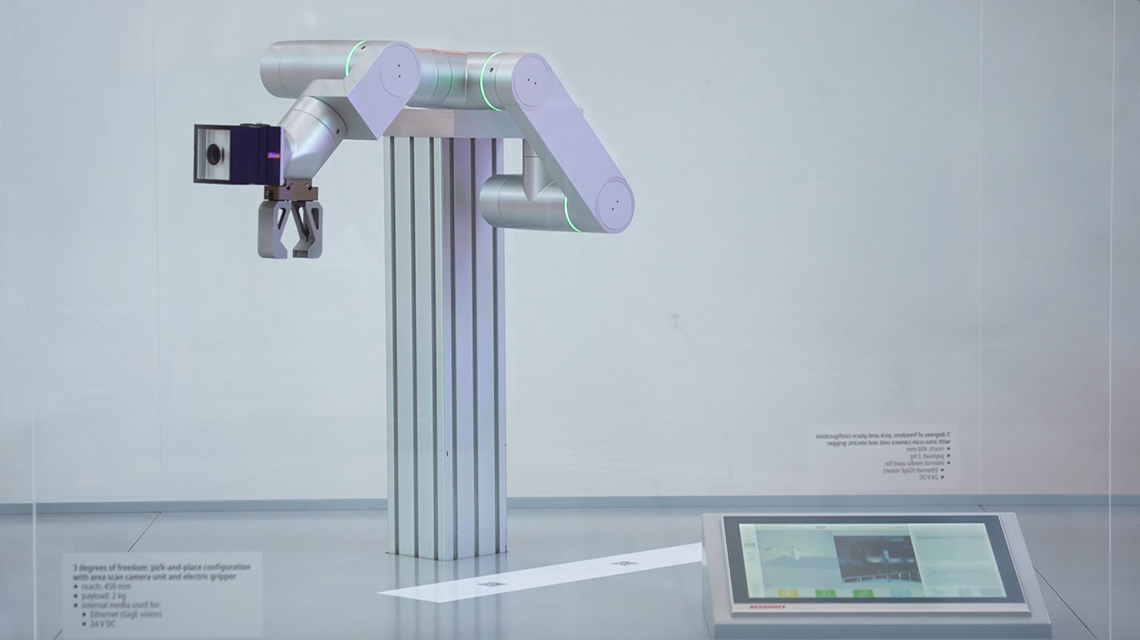
- 四轴拾放机器人
- 五轴码垛机器人
- 六轴串联机器人
- 七轴协作机器人,增加了对难以触及区域的可达性
- 多臂运动系统
全集成在控制平台中

自动化新技术:ATRO 模块化机器人的推出代表倍福再次践行了其“自动化新技术”的企业发展理念和主张。模块化机器人的开发以及它们与整个控制平台的全面集成,既完善了倍福自动化产品线拼图,又在自动化发展历程中树立了新的里程碑。
ATRO 机器人解决方案可以直接集成到运动控制、功能安全、机器学习、物联网、数据分析、机器视觉、云端工程平台和 HMI 中,并能够与 XPlanar 和 XTS 等智能输送系统直接结合,可以充分发挥设备性能。ATRO 模块化机器人的另一个主要优势是:所有组件之间都能够互相通信。这样可以实现高精度时间同步,即实现产品输送过程中系统之间的高动态交互。并且能够实现双向数据传输,从而简化配置。同时减少机器人调试时间及工作量,只需几分钟就能完成初始动作。
倍福全新的机器人解决方案与基于 PC 和 EtherCAT 的整体控制方案完美结合。
配备标准接口的模块化设计
ATRO 模块化机器人系统的推出标志着机器人发展迎来了真正的转折点。它可以直接集成到倍福的系统解决方案中,让设备制造商能够根据自己的需求完全集成机器人技术和自己的运动学,提供最匹配的生产设备。模块化机器人解决方案可以根据任务需求精确匹配合适数量的轴,并且可以自由扩展、修改和扩充。
所有模块的末端执行器处都集成了一个数据、电力和流体(真空和空气)的介质传输接口, 可以轻松集成如机械抓手、气动抓手以及电动抓手等工具。另一个主要优点是,所有介质传输接口的设计方式都可确保轴及工具双向无限制旋转。
完整解决方案的模块化和可扩展特点既可确保设备满足未来兼容要求,也能够保障投资安全性。机器人可以在不同的设备上灵活使用,并可以根据新的任务需求轻松重构。
性能强大、占地面积极小的机器人成套系统

ATRO 模块化机器人解决方案可以无缝集成到倍福系统架构中,能够与 XTS 和 XPlanar 等智能输送解决方案直接结合使用。用户现在能够基于紧凑的机器设计配置性能强大的机器人成套系统,最大程度地减少系统占地面积。得益于 EtherCAT,所有组件都能够完全同步, 所有轴都能够通过 EtherCAT 通信执行任何高动态运动,因此也能够轻松实现拾放应用。
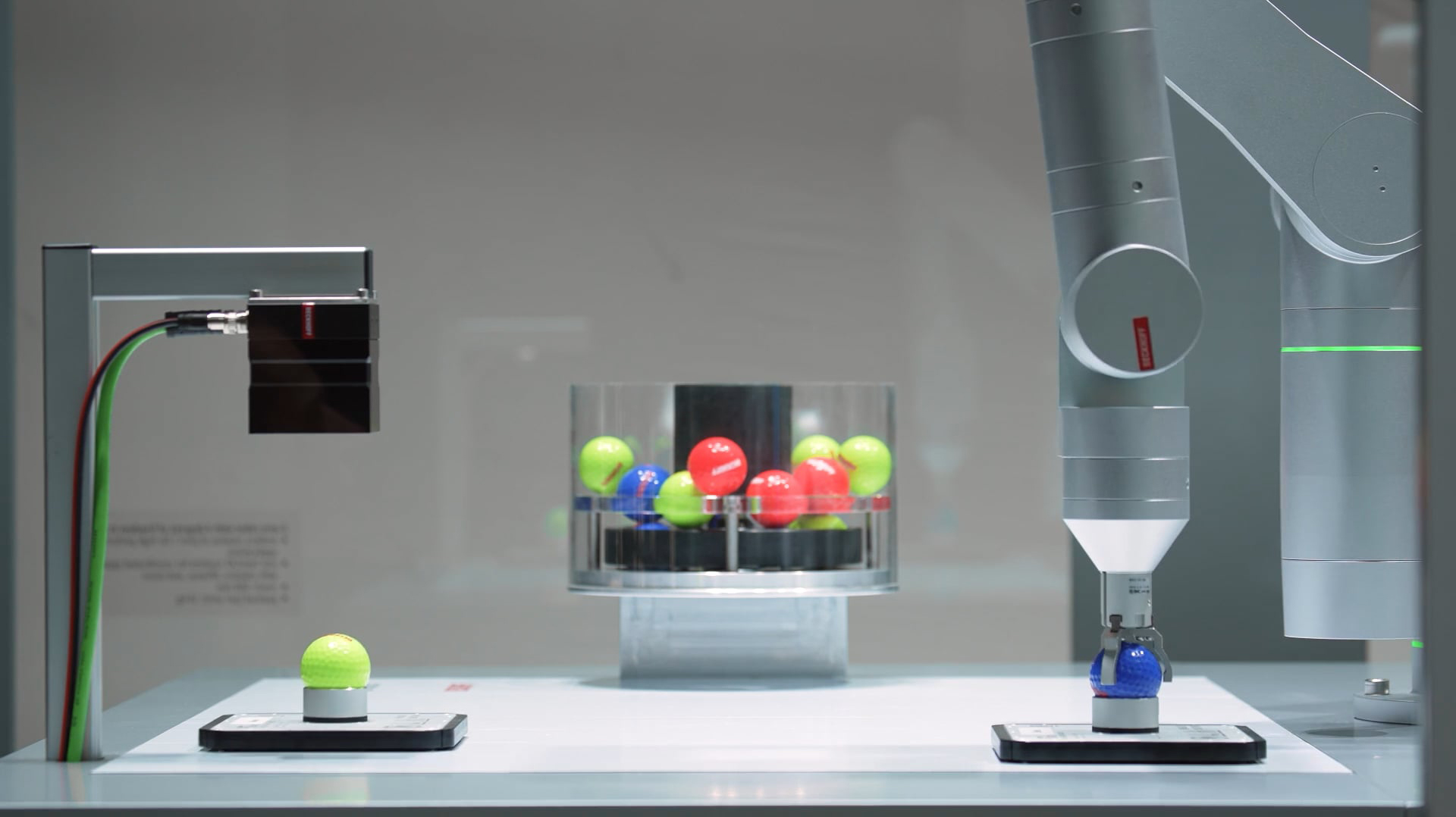
XPlanar 系统可以将不同尺寸的盒子从仓库分别灵活地输送至一个或多个机器人工站。盒子中的产品通过 Vision 机器视觉系统识别和定位,并由机器人拾取。分离后的产品在辊筒输送机正在运行的辊道上移动,随后被分拣到相应的运输箱中, 例如,通过用作辊筒输送机 MDR 驱动器(电机驱动的辊筒)的 EP7402 EtherCAT 端子盒实现同步。
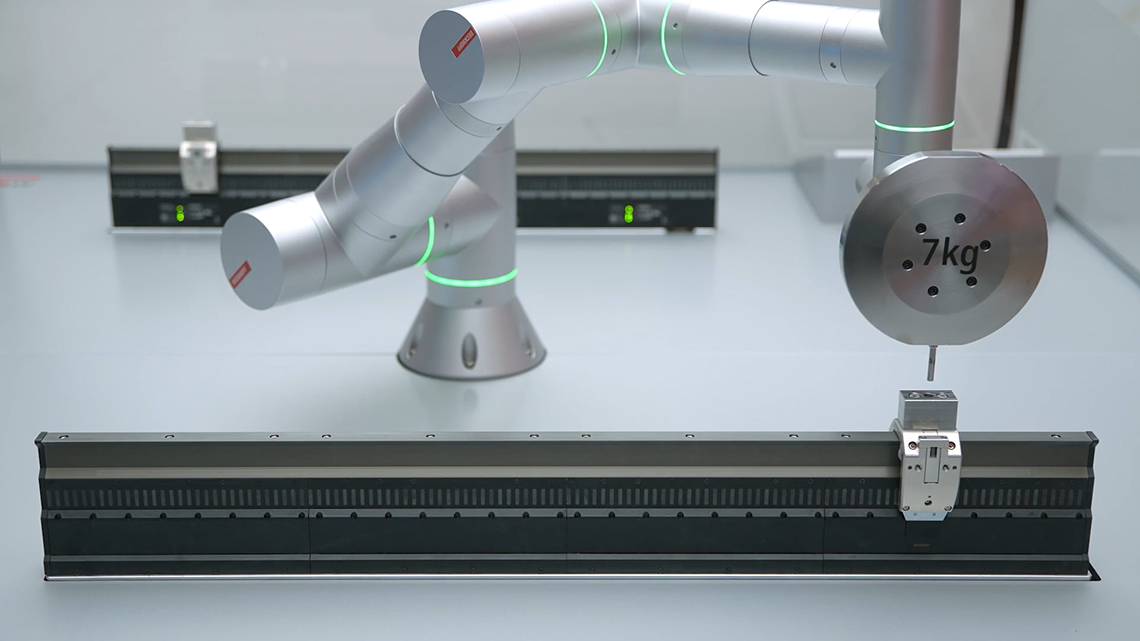
机器人的有效载荷和工作范围取决于实际应用。使用多臂协作机器人配置还能提高拾放应用吞吐量,确保始终可以腾出一只手臂抓取产品。码垛机器人用于将成品包装盒堆放在生产线末端;这些机器人模块可以随意组合使用,目前支持五轴配置。

倍福模块化机器人系统在机器人配置方面提供了充分的自由。可扩展和易插拔的电机和连接模块可以成功打造定制化机器人解决方案,且可以随时扩展和修改。设备制造商可以实现他们自己的运动学,而客户可以随时方便快捷地调整他们的机器人解决方案,以适应不断变化的生产条件。适配的结构通过控制器扫描,TwinCAT 机器人功能自动创建相应的控制应用程序,包括数字孪生。
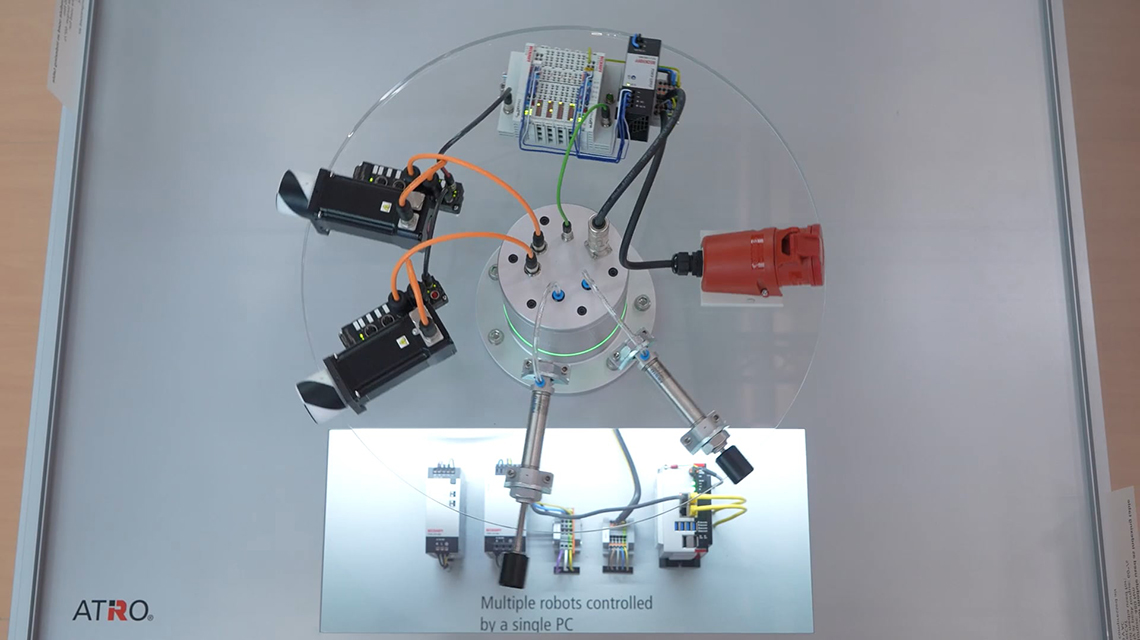
控制轴所需的所有电子元件都集成在电机模块中,包括一台 EtherCAT 伺服驱动器、带抱闸的电机和一个结构非常紧凑的减速机。机器人只需一台控制器,甚至还能够直接集成到现有的设备控制系统中。


倍福模块化机器人中的流体、电力和数据都在内部传输。另一方面,传统的机器人解决方案通过外部设备输送介质,因此在旋转和作业空间方面会受限。而倍福的解决方案则彻底打破了这种限制:每个关节都可以无限制旋转。由于无需“切断“外部传输介质的供应,因此能够实现更短的定位路径。
ATRO 模块化即插即用机器人系统进一步完善了倍福的自动化产品线拼图,让设备制造商和用户首次能够实施全集成自动化解决方案。整体系统方案的好处有以下两个方面:首先,可以一站式提供各种匹配的软件和硬件组件:从设备电源到模块。其次,机器人技术、机器视觉、功能安全、云连接和机器学习等所有功能都全部集成在同一个控制平台上。
ATRO 模块化机器人解决方案可以无缝集成到倍福系统架构中,能够与 XPlanar 和 XTS 等智能输送解决方案直接结合。这不仅有利于配置一个性能非常强大的整体解决方案,提升系统输出,还可以将设备占地面积减少到以前无法实现的程度。得益于 EtherCAT,所有组件都能够完全同步, 所有轴都能够通过 EtherCAT 通信执行任何高动态运动,因此也能够轻松实现拾放应用。


Beckhoff Live + Interactive
-
 多媒体
多媒体ATRO: The system that's a step ahead of the game
ATRO stands for Automation Technology for Robotics. In this video, we present the system: what are the advantages of modular robotics? What does our modular industrial robot system hold in store? Thomas Morscher-Unger from the ATRO development team provides an overview.
-
 多媒体
多媒体The perfect robot for every application
The ATRO system consists of scalable plug-in motor and link modules and offers extensive options that allow you to design your own ATRO kinematics. Watch this video to find out more about the applications that can be brought to life through this concept.
-
 多媒体
多媒体All functionalities on a single control platform: ATRO and TwinCAT
ATRO is integrated into TwinCAT automation software. What does the software for ATRO look like and what can be achieved with it?
-
 多媒体
多媒体ATRO assembly in the TwinCAT HMI
In this video, we demonstrate the functions and an assembly of ATRO in the TwinCAT HMI user interface.
-
 多媒体
多媒体TwinCAT CoAgent for Operations 助力实现实体 AI
通过语音指令即可轻松实现工业机器人编程 — TwinCAT CoAgent for Operations 使这一切成为可能。
-
 多媒体
多媒体Material handling with ATRO and XTS
ATRO is the next logical stage of Beckhoff's holistic PC- and EtherCAT-based control philosophy and can be directly combined with the intelligent transport systems. In this video, we show you how ATRO and XTS work together.
-
 多媒体
多媒体Material handling with ATRO and XPlanar
Linking with XPlanar and simple integration of all Beckhoff components into the robotic system result in extremely compact machine designs that really cut down on the machine footprint. Find out more in this video.
-
 多媒体
多媒体来自客户的声音:博格华纳
我们采访了我们的客户博格华纳的 Enrique Lopez。博格华纳是一家全球领先的汽车和电动汽车系统及汽车零部件供应商。
-
 多媒体
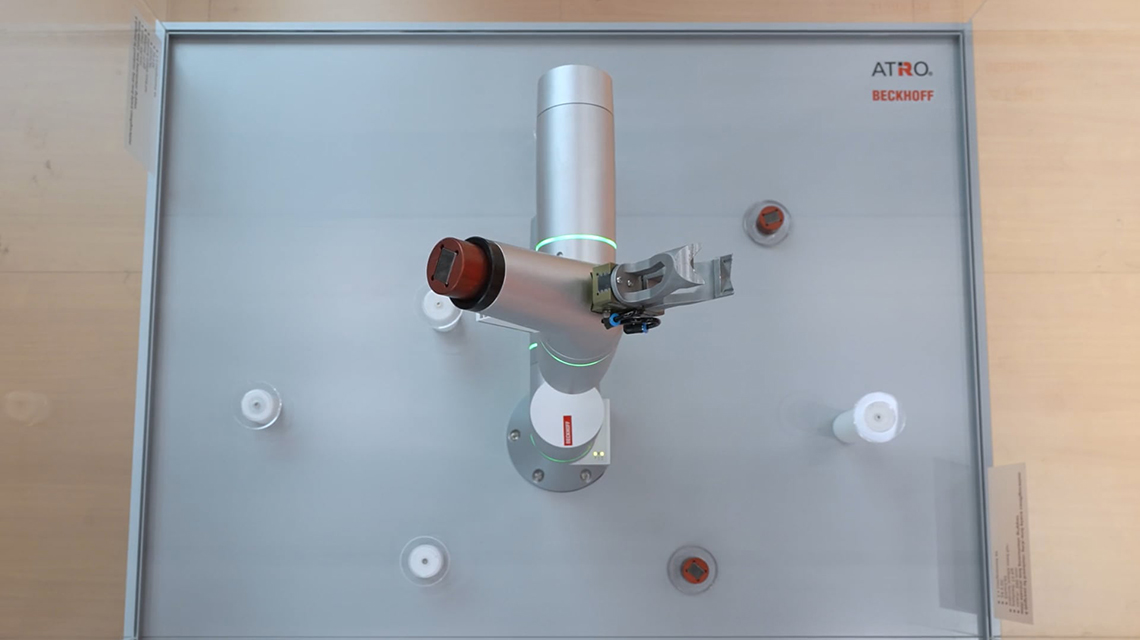
多媒体ATRO:单轴旋转分度台
ATRO 系统是一款模块化工业机器人系统,可用于构建自定义运动学,例如集成动力系统的单轴旋转分度台。
-
 多媒体
多媒体Powerful and comprehensive package with ATRO and XTS
Thanks to seamless integration into the Beckhoff architecture, ATRO robots can be combined directly with intelligent transport solutions such as XTS, enabling highly dynamic pick-and-place applications—even with heavier loads.
-
 多媒体
多媒体ATRO:三轴机械抓手
ATRO 系统由可扩展的可插拔式电机和连接模块组成,并提供丰富的选件,支持用户自主设计 ATRO 运动学。观看本期视频,了解有关三轴机械抓手的更多信息。
-
 多媒体
多媒体ATRO: 4-joint pick-and-place robot
All ATRO modules feature an internal media feed for data, power, and fluids (e.g. vacuum, air), which are made available at the end effector via the ATRO interface. This means, for example, that a wide variety of tools such as mechanical, pneumatic, or electric grippers can be integrated with ease.
-
 多媒体
多媒体New machine concepts with ATRO and XPlanar
ATRO can be seamlessly combined with intelligent transport systems such as XPlanar and XTS, enabling fully networked integration of all components. Thanks to precise time synchronization, highly dynamic interactions between the systems can also be easily implemented during product transport. The compact, modular machine design of ATRO ensures a minimal footprint.
















