产品








TwinCAT 2
TwinCAT 2 software consists of TXxxxx base components and additional TSxxxx supplement products.
TwinCAT 的世界:基于 PC 的开放式控制技术

倍福推出的基于 PC 的控制技术定义了自动化领域的全球标准。在软件方面,1996 年推出的 TwinCAT(The Windows Control and Automation Technology,基于 Windows 的控制和自动化技术)自动化套件是倍福控制系统的核心部分。通过与 TwinCAT 软件结合使用,基于开放性和高度可扩展性原则,构建优化协调的自动化解决方案。
TwinCAT 可将任何一个基于 PC 的系统转换为一个带多个 PLC、NC、CNC 和机器人实时操作系统的实时控制系统。可模块化扩展的硬件和软件组件便于随时修改和添加功能,在需要时,控制解决方案具备的开放性不仅允许集成第三方组件,还可以为现有设备和系统定制改造方案,这样既能确保灵活性,又能保障客户的投资安全。
TwinCAT 3:灵活的基于 PC 控制的软件解决方案

通过与最新版本的 TwinCAT 3 软件结合使用,基于开放性和高度可扩展性原则,构建优化协调的自动化解决方案。
TwinCAT 3是继 TwinCAT 2 软件之后的最新版本,它重新定义了我们所熟知的自动化技术领域。整个控制智能在同一个软件平台上实现,并分为开发环境和 Runtime 两个部分,这仍然是系统的基础。
此外,开发组件和 Runtime 组件可以通过添加应用专用的软件模块(功能组件)的方式灵活扩展,因此,TwinCAT 系统可以很好地满足各种特殊需求。
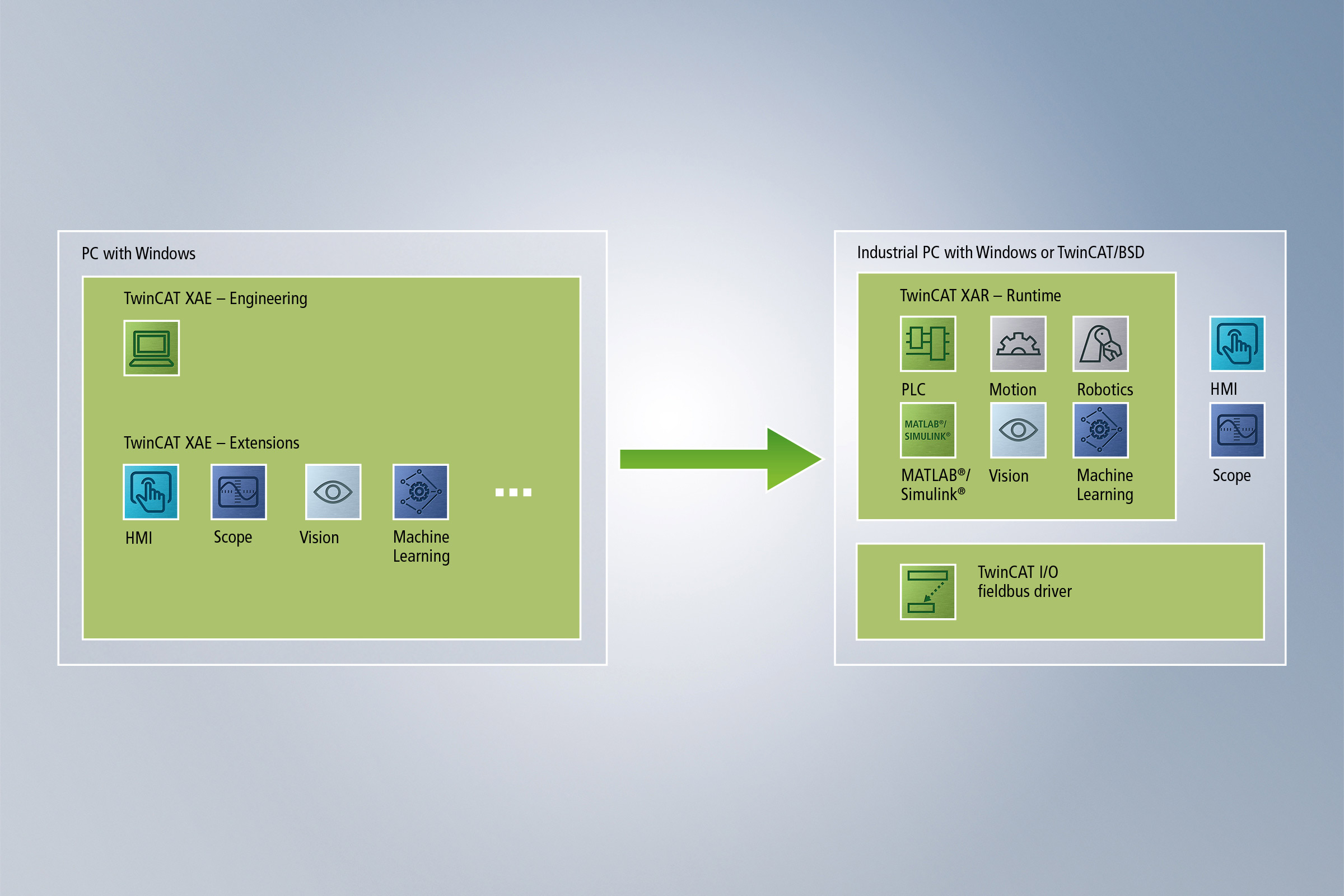
开发
TwinCAT XAE(扩展自动化开发平台)允许在一个开发工具中编程和配置硬件。除了 IEC61131-3 编程语言之外,还可以使用 C/C++ 和 MATLAB® and Simulink® 编程语言。该工具甚至还可提供程序代码的集成调试选项和控制硬件的诊断功能。开发组件可以通过添加诸如软件示波器等额外功能的方式进行功能扩展。
Runtime
TwinCAT XAR(扩展自动化运行时)是一个具有实时能力的 Runtime 组件,它可以执行程序代码用以控制设备的现场模块。模块化的结构可以根据具体的应用需求通过功能组件的形式安装和加载扩展功能。除了独立于操作系统执行的实时核之外,基于 PC 的控制器上始终运行着一个操作系统,因而可以执行其它应用程序。这意味着控制平台也可用于可视化或执行客户专用的软件等任务。
TwinCAT 3 功能组件
TwinCAT 是一个可以根据应用需求针对具体项目单独组装的模块化系统。除了实际的开发和控制系统之外,这种模块化结构体现为分成若干不同类型的 100 多个功能组件。
TwinCAT 功能组件可以根据具体应用的需求扩展运动控制和安全等基础组件。例如,测量或基于用户接口的 TwinCAT HMI 作为模块都是通过统一的接口与实际设备控制器无缝交互。若要支持如 OPC UA 等更多的通信协议,只需后续安装相应的模块即可。即使是最新的功能组件,如机器学习或机器视觉功能,也可以用同样的方式加装到现有系统中。

TwinCAT 3 系统:TwinCAT 3 的其中一大优势是可以使用 TwinCAT 3 功能组件进行各种扩展。“System”区域中的功能组件可在基本组件功能的基础上添加其它重要功能。

TwinCAT 3 HMI 基于最新的 Web 技术(HTML5、JavaScript/TypeScript),允许用户开发独立于平台、 具有“响应式布局”的用户界面,即:能够自动适应屏幕分辨率、尺寸和手持的方向。TwinCAT HMI 的开发集成在大家熟悉的 TwinCAT 开发环境中,并提供一个“所见即所得”的图形编辑器。

TwinCAT 3 Measurement:TwinCAT 3 不仅仅是一个自动化软件,它也是一个测量软件。TwinCAT 3 Measurement 功能组件通过额外的测量功能扩展 TwinCAT 软件的应用领域,支持显示设备调试、设备监测、过程记录以及测量和分析结果。

TwinCAT 3 Controller:控制任务可以通过 TwinCAT 3 系统中的各种模块化的软件产品轻松实现。此外,还有一款用于语音输入和输出的软件产品 TF4500.

TwinCAT 3 Motion Control 包含一个可扩展的运动控制软件包, 该软件包可实现简单的 PTP(点对点)运动控制、机器人模型控制和复杂的 CNC 数控系统控制等模块。通过硬件物理层可以实现对各种驱动设备的灵活控制。

TwinCAT 3 Connectivity:TwinCAT 3 的其中一大优势是可以与其它系统进行各种交互和通信,大量的通信功能组件可以满足各种通信场景的需要。

TwinCAT 3 Vision 功能组件提供一个开放、可扩展的图像处理解决方案,它可以完全集成到通用的 TwinCAT 3 自动化平台中。 相机的配置和图像分析编程都在用户所熟悉的 TwinCAT 环境中完成,显著简化了开发工作。

TwinCAT 3 行业专用:TwinCAT 是一种应用范围非常广泛的通用型控制技术,同时也可以满足特殊行业的特殊要求,例如可根据行业特定任务精确定制扩展 TwinCAT 功能组件。
除了简约化基本原则(该原则贯穿于 TwinCAT 3 的各个方面:从开发流程和 Runtime 运行到透明的成本显示)之外,该自动化软件还具有其它很多出色的功能。
减少开发工作量:TwinCAT 3 将所有开发组件集成到 Microsoft Visual Studio 中。从 PLC 编程到可视化和数据分析,所有操作都在一个集成式环境中进行。这样可以保持较低的培训和专业训练成本,为用户带来进一步的成本优势。与源代码管理系统(如 Git)的连接使相关工程师可以在一个团队中进行 TwinCAT 项目的开发,这使得代码的个别修改和整个代码的版本管理都变得很容易。更重要的是,由于能够将持续集成和持续交付纳入代码开发流程,因此先进的敏捷开发方法可以得到实施。
提升灵活性:TwinCAT 能够独立于硬件开发应用程序:从基于 Arm® 的小型控制器到多核 CPU 的高性能控制器都能运行。对于实时控制软件编程,可以在 IEC 61131-3 编程语言、C++ 和 MATLAB® and Simulink® 之间灵活选择。
高效项目规划:TwinCAT 的模块化结构便于轻松实现软件组件的重用和维护,可以基于面向对象的编程生成可重用的结构化程序代码。模块之间的通信也可以通过标准化的数据交换轻松实现,因此用 IEC 61131-3 编程语言、C++ 或 MATLAB® and Simulink® 语言编写的模块可以灵活地相互组合。
接口可自由选择:TwinCAT 3 提供多样化的接口,可以方便地通过 OPC UA 等协议实现与数据库或云端服务器的 IT 连接。在现有协议的基础上可以根据客户需求扩展新的协议。倍福还支持所有常见的现场总线系统,因而能够灵活响应现场总线领域的不同需求。
合理定价:TwinCAT Engineering 的基本功能是免费提供的。用于执行控制代码的 TwinCAT Runtime 环境也可以在一个可更新的 7 日免费授权上试用。对于永久授权操作,可以根据所使用的硬件性能提供适用的授权模式。倍福还将为全球所有客户免费提供技术支持服务。
保障投资安全:TwinCAT 3 软件自 2010 面市以来,正不断利用创新技术(如图像处理和机器学习)进一步发展。在以前版本中创建的项目今天仍然可以使用转换器迁移到新版本中。这样可确保旧项目的专业知识可以继续在新版本中使用,并在此基础上扩展最新的功能。