
我们为客户提供了一个由基于 PC 的控制技术、EtherCAT 系统以及 XPlanar 平面磁悬浮输送系统、XTS 磁驱柔性输送系统和 ATRO 模块化工业机器人构成的灵活、高性能的自动化平台。我们的高性能控制技术非常适合用于对高速和高精度要求极高的搬运与装配应用,即使是“慢速”过程也能从倍福的自动化解决方案中获益,从而提高生产效率。这也适用于从输送、连接、焊接和粘接到装配和测试,从小批量定制化生产到大批量生产,从简单应用到复杂应用等方方面面。
搬运与装配技术革命性的飞跃:
- 通过创新技术赢得竞争优势
- 适用于高速高精度应用的端到端解决方案,无论是简单应用还是复杂应用
- 智能产品输送系统提升设备设计的灵活性
- 凭借深厚的行业专业知识提供专业建议
您有什么疑问吗?
我们的装配与搬运技术

基于 PC 的控制技术将所有控制功能整合在同一个平台上
通过基于 PC 的控制技术,倍福可为搬运与装配领域的所有任务提供开放式系统解决方案:采用模块化结构设计,在性能、设计和价格方面都具有可扩展性,并可为实现过程控制、HMI、运动控制、机器人技术、安全、测量技术以及机器视觉和物联网集成等所有机器功能提供各种硬件。倍福工业 PC 是系统的核心部分,配合模块化、实时的 TwinCAT 软件架构,以及用于连接所有控制组件的高性能 EtherCAT 通信系统。基于 PC 的控制技术可为您提供面向未来的解决方案:
搬运与装配技术革命性的飞跃:
- 在软件和硬件方面都具有良好的开放性:从整合您的工艺专业知识到云连接
- 即使是最具挑战性的装配和运动顺序,也能实现灵活的自动化和高精度同步
- 可根据具体的应用需求定制在性能、设计和价格方面最为合适的解决方案

TwinCAT 3 — 高灵活性,模块化设计,出色的性能
TwinCAT 3 自动化软件集成了所有开发和 Runtime 过程,可以实现所有控制任务,其中,TwinCAT Motion Control 3(MC3)是 TwinCAT 3 自动化软件的重要组成部分。新一代运动控制软件产品扩展了 TwinCAT NC2 的功能,包含了支持多核技术和多任务并行处理等各种功能。TwinCAT 可以帮助您将复杂的装配和搬运设备的性能提升到一个新的水平,并能够使用 IEC 61131-3 标准、C++ 或 MATLAB® and Simulink® 灵活编程。
TwinCAT 在装配与搬运技术方面的亮点:
- 集成了所有所需的设备功能:从HMI、运动控制、XTS、XPlanar、机器人技术、安全和测量技术到机器视觉、机器学习h和云解决方案的整合
- 丰富的运动控制功能库以及各种机器人运动学功能库
- 无固定轴数限值的可扩展运动控制平台
- 能够高精度实现所有 CPU 核(多核)的多个轴和轴组运动同步

EtherCAT:超快速、灵活、开放
EtherCAT 技术由倍福公司于 2003 年推出,并作为自动化技术的开放式标准。EtherCAT 具有性能出色、拓扑选择灵活、诊断功能全面及配置简单等特点,非常适合用于装配和搬运应用。EtherCAT 是不二之选:是迄今为止市场上速度最快、性能最高的工业以太网技术。
EtherCAT 在装配和搬运应用方面的亮点:
- 极快的循环时间,实现精确、高效的工艺流程
- 市场上有大量兼容 EtherCAT 技术的传感器和执行器
- 灵活集成 CANopen、IO-Link 和 PROFINET 等其它现场总线系统
- EtherCAT P 单电缆解决方案可显著减少布线工作量
- EtherCAT G 的通信速度达到 1 Gbit/s,EtherCAT 10G 的通信速度达到 10 Gbit/s,可显著提升性能

针对高动态和高精度定位任务的驱动系统
凭借我们在电力驱动领域无与伦比的各项技术,我们为客户提供了明显优于竞争对手的技术优势:无论是带同步伺服电机的多轴伺服系统、高动态的直线伺服电机、紧凑型电动缸、管状电机、针对低电压范围的紧凑型驱动产品,还是用于实现无控制柜设备的驱动技术解决方案,所有一切都可集成在系统中,并可组合使用,实现高性能的装配工艺。
具有高可扩展性的驱动技术优势一览:
- 多种驱动技术整合在一个系统中:可根据您的应用需求结合多种驱动和搬运技术并精确同步
- 为装配工艺带来颠覆性变革:智能输送系统助力打造卓越的设备方案。
- 单电缆技术:将动力和反馈系统整合在一根标准电机电缆中,显著节省安装空间,缩短安装时间
- 安全性高:通过 TwinSAFE 安全自动化技术,可以为所有驱动解决方案提供安全功能
- 紧凑型驱动技术:针对低电压范围内的运动控制
倍福针对装配与搬运技术领域的产品亮点

MX-System 无控制柜ji解决方案
MX-System 首次实现了无控制柜自动化解决方案。由模块化组件构成的底板和功能模块(工业 PC、耦合器、I/O、驱动器、继电器和系统模块)打造出完整的系统,它拥有传统控制柜的所有功能:供电、熔断器保护和配电、辅助电压的生成和监测、带输入输出的控制系统、电机和执行机构的控制以及现场设备连接层。组件符合各项国际标准,极大地减少了规划、装配、设备安装及维护工作。
MX-System 优势一览:
- 由于无需使用控制柜,释放了更多生产空间
- IP67 级外壳适用于所有区域
- 减少工程设计、装配和测试工作,提高设备加工效率
- 可与 EtherCAT 端子盒和 AMP8000 分布式伺服驱动系统结合使用
- 通过 FSoE(FailSafe over EtherCAT)将安全功能集成到驱动器和 I/O 中
- 大大减少设计规划和装配工作和时间

重塑机器人技术:机器人自动化技术
ATRO 一 种模块化工业机器人系统可以根据不同的机器人运动学需求(从简单的单轴旋转分度台到多臂协作机器人)定制并灵活组合拼装。各种尺寸的标准电机模块与各种形状设计和长度的连接模块一起组装在底座模块上,用于实现供电和介质传输。控制设备完全集在整个 TwinCAT 3 控制平台中,因此可以直接使用各种成熟的自动化功能。ATRO 模块化机器人可以与 XPlanar 和 XTS 直接结合使用,并将所有组件精确同步到机器人系统中,可以实现全新的设备方案。
ARTO 优势一览:
- 模块化系统可以实现个性化和可灵活扩展的机器人解决方案
- 控制设备完全集在整个 TwinCAT 3 控制平台中,消除了各种技术壁垒
- 可双向无限旋转的轴能够与所有设备过程同步,能够实现更快的循环时间
- 用于数据、电力和流体的传输接口可减少设置、维护和停机时间

Beckhoff Vision — 可扩展的高性能软硬件解决方案
Beckhoff Vision 可以提供种类齐全的图像处理组件,进一步扩展了机器视觉在装配与搬运技术中的应用范围。高性能相机、精密光学镜头、可变色照明和三合一视觉单元与 TwinCAT Vision 图像处理软件相结合,构成了一个功能强大的系统。系统被整合到基于 PC 的控制系统中并可通过 EtherCAT P 集成到现有的控制环境中,进一步消除了以前机器视觉与自动化技术之间的严格分离。这样可为设备制造商带来众多优势,包括能够实现相机与装配过程的同步。
系统集成图像处理的优势一览:
- 一站式提供相机、光学镜头、光源、配件以及软件
- 一步完成视觉解决方案系统集成
- 通过 EtherCAT P 实现通信和供电的独特优势
- 可无缝集成到系统中的开放式机器视觉解决方案

XPlanar:更小的空间,更大的灵活性
XPlanar 智能输送系统将装配生产线的灵活性和性能提升到了一个全新水平,并显著降低了空间要求。XPlanar 平面磁悬浮输送系统的悬浮效应确保动子在可灵活配置的轨道布局上无磨损、高动态地移动。通过合理组合各种尺寸的平面模块和动子,最多可减少 50% 的占用空间。
XPlanar 优势一览:
- 动子可在整个系统中精准定位和灵活移动
- 平面模块可根据具体的应用需要自由拼接成任意几何形状
- 单件产品的平面输送速度可达 2 m/s
- 可以进行高达六个自由度的运动,包括 360 度旋转
- 不同形状的动子和平面模块可以双轨运行,有效提高空间利用率
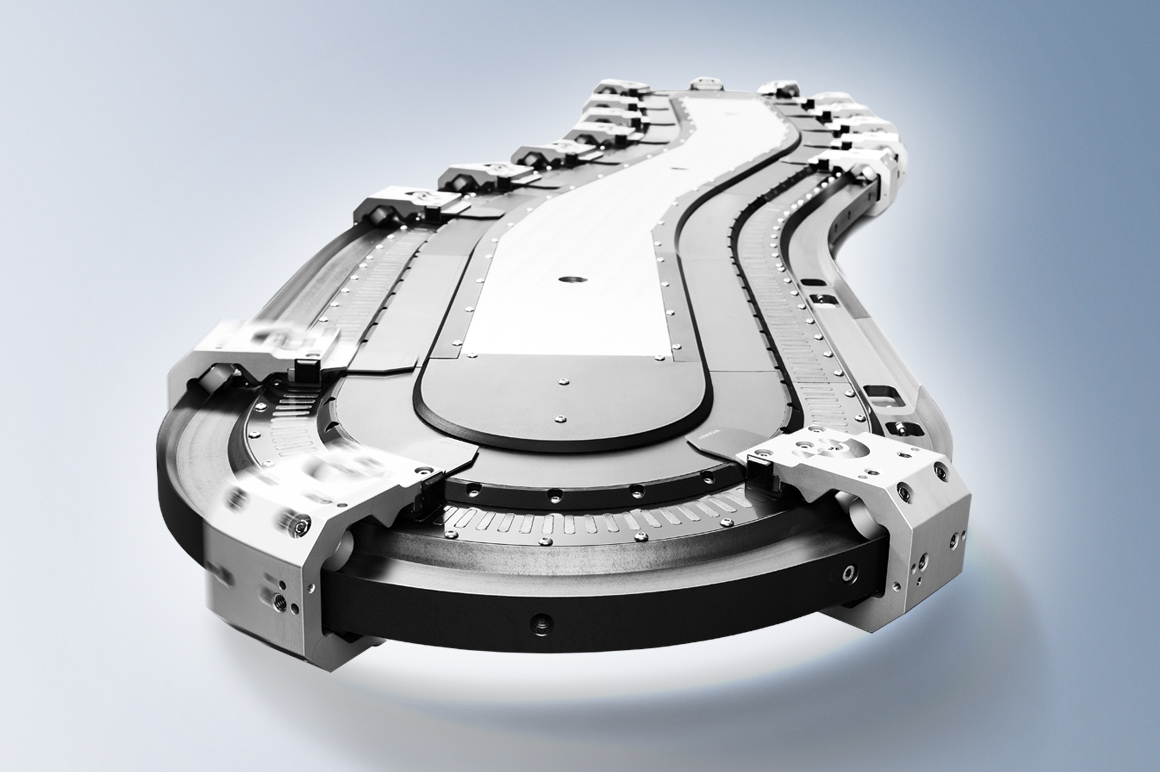
XTS:智能产品输送系统助力优化装配生产线
XTS 磁驱柔性输送系统为减少设备占地面积和优化整个装配工艺提供了丰富的选择。不同形状的电机模块可以实现定制的输送路线。由于每个动子都是独立控制的,因此即使是非常复杂的工艺流程,也能够通过可灵活配置的运动轨迹实现。若与无电缆技术(NCT)相结合,可实现 XTS 动子非接触式连续供电和同步实时数据传输,带来更大的灵活性。有了 NCT,每个动子都可以成为移动式装配站。
XTS 优势一览:
- 灵活的磁驱柔性输送系统提供不同的轨道选择
- 规格修改基于软件实现,可实现小批量定制化生产
- 灵活的运动轨迹可调节装配工站的不同加工时间
- 通过 NCT,XTS 系统成为装配过程中的一个重要组成部分
- 动子可以在运动过程中完成对产品的加工和质量检测,显著提高设备效率,减少设备占地面积
