模块化设计和扩展组件助力提升自动化系统开发的灵活性

由于采用了全新的模块化安装,TwinCAT 不仅可以像以前一样以三种方式安装在工业 PC 上, 而且可以根据自己的偏好选择特定的软件包,然后进行安装或更新。除了能够独立更新组件之外,客户还可以从更快的安装速度和更短的更新时间中获益。

TwinCAT 3.1 Build 4026 也可以与 Microsoft Visual Studio 2022 一起使用。对 Microsoft Visual Studio 2022 的支持为软件开发提供了一个 64 位的环境,因此可以将更多的主内存用于更大的工程项目。TwinCAT 提供的 XaeShell 也有一个基于 Microsoft Visual Studio 2022 的更新版本。TwinCAT 3.1 Build 4026 支持 Microsoft Visual Studio 2022 以及 2017 和 2019 版本。
创新亮点一览




新版TwinCAT 3.1 Build 4026的简短介绍视频和网络研讨会总结了该版本中最重要的创新:
- TwinCAT 3.1 Build 4026 - 有什么新功能?
- TwinCAT 3.1 Build 4026 - 简介(网络研讨会)
- TwinCAT 3.1 Build 4026 - PLC 更新(网络研讨会)
- TwinCAT 3.1 Build 4026 - 软件包管理(网络研讨会)
上一版本 TwinCAT 3.1 Build 4024
TwinCAT 3.1 Build 4026 之前的版本是 Build 4024 版本。它仍然是有效的。Build 4024 的所有属性都包含在最新的 4026 版本中。
Build 4024:提高工程效率和一体化
- 集成 Microsoft Visual Studio® 2017 Shell(TcXaeShell)
- 新的启动页,包含 TwinCAT 信息的新的RSS订阅
- 支持 Microsoft Visual Studio 2019(Build 4024.10 及以上版本)
- 机器变体配置简单
- 版本特定的组件禁用/激活
- 版本特定的参数设置
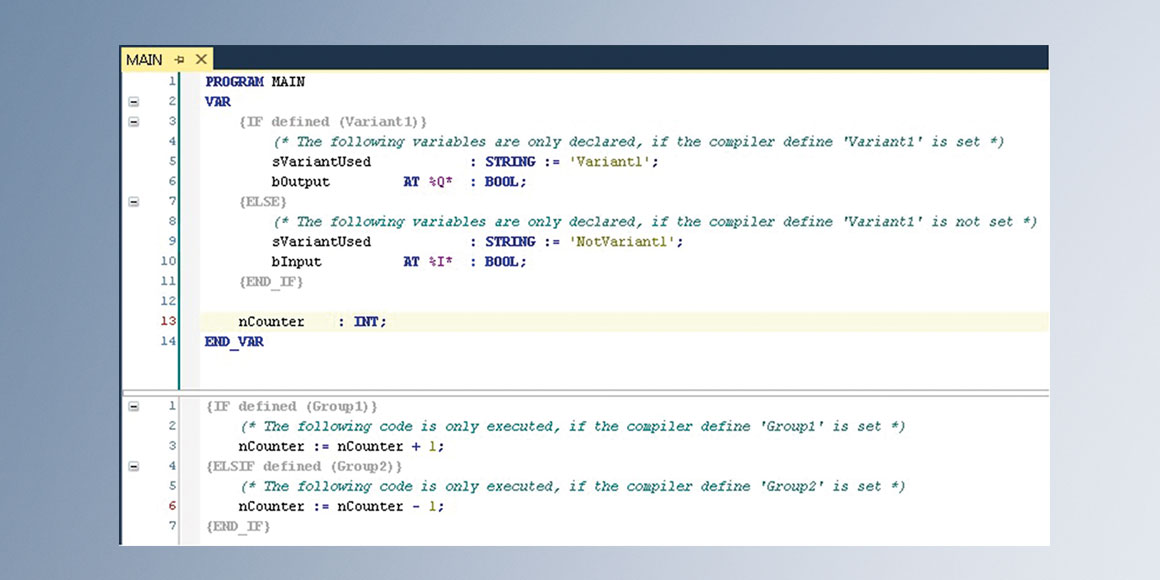
- 通过 PLC 中的“条件编译”显示

- 多名程序员可以同时在同一个 PLC 项目上工作
- 集成工作流程
- 缩短调试时间
- 高可追溯性