全球电动汽车市场的快速增长对电池的生产速度和效率提出了很高要求,只有使用基于 PC 的高性能自动化解决方案才能满足这些要求,通过中央平台控制从电芯到模组和电池包组装等复杂流程。
Beckhoff Automation 汽车行业经理 Tilman Plaß:
“最小化设备占地面积和加快生产速度是实现电池大规模量产的关键。灵活的产品输送系统和基于 PC 的控制技术可以助力实现这些目标。此外,还可以通过软件快速、轻松地更改各个工艺。”
Beckhoff Automation 汽车行业经理 Jörg Rottkord:
“电池生产商已经意识到,在未来快速增建现代化超级工厂时将工艺数据(即配方)与设备相应控制参数进行关联的重要性。因此,基于 PC 的控制器(例如安装有 TwinCAT 的工业 PC)对于在下一个位置以及相关生产线上积累经验具有极为宝贵的优势。因为通过控制器集中管理这些设置参数,而不是通过驱动器本身,可以随时“克隆”和共享这些数据。同时还可以进行额外的虚拟调试。”
在电芯批量生产过程中,即使是节省每个生产步骤中最微小的时间或能源,也会产生重要影响:这些优化措施加在一起,不仅能够显著提高生产线的产量,甚至还可以降低成本,减少碳排放。若要尽可能提高电池自动化生产的效率,就必须仔细研究设备和系统中使用的控制技术:生产节拍越快,产量就越高。这可以通过一个简单的例子来说明:如果一台线阵相机在一个周期内可以捕捉到 5 毫米的带材,那么它可以在 1 秒的时间周期内,通过控制技术实现精确的 5 毫米/秒的速度。另一方面,基于 PC 的控制技术可以实现 50 µs 的周期时间,速度提高了 20 倍,同时保持相同的信息密度。倍福基于 PC 的控制技术将所有控制功能集成在中央 PC 平台上,可以显著提高生产速度。所有功能的编程和控制都由工业 PC 上运行的同一个软件系统实现。由于所有信息都有一个共同的时间基准,因此确保了所有组件之间都能高效交互和同步。这样还可避免数据出现如在不同系统之间进行通信时出现的那些传输损耗和延迟问题。
基于 PC 的控制平台的核心是高性能的处理器,可以集中执行计算密集型任务。这意味着可以通过工业 PC 同步控制大量轴,例如卷绕电池所需的轴,即使是高度复杂的运动控制任务,也可以高精度、高速度地完成。还可以通过高性能的 PC 系统将视觉应用和机器学习场景直接集成到控制系统中。由于基于 PC 的自动化解决方案在软件(添加软件模块)和硬件方面(更高性能的多核处理器)都具有易于扩展的特点,因此,无论是软包电池、圆柱电池还是方形电池生产设备,甚至考虑到未来的需求,它们可为所有电池制造设备类型带来优势。
基于 PC 的控制技术不仅能够实现极高的效率和速度,还能够彻底改变传统的生产方式,实现全新的生产方案。例如,高性能工业 PC 可用于控制倍福的 XTS 和 XPlanar 智能输送系统,实现个性化的电芯输送:在输送电芯时,动子既可沿着线性输送轨道进行输送,也可通过悬浮在专用的平面模块上进行平面输送。这些个性化的输送路线显著减少了系统的占地面积,最大限度地提高了生产的灵活性,并实现了持续、无缝的产品跟踪。
基于 PC 的电池生产控制解决方案
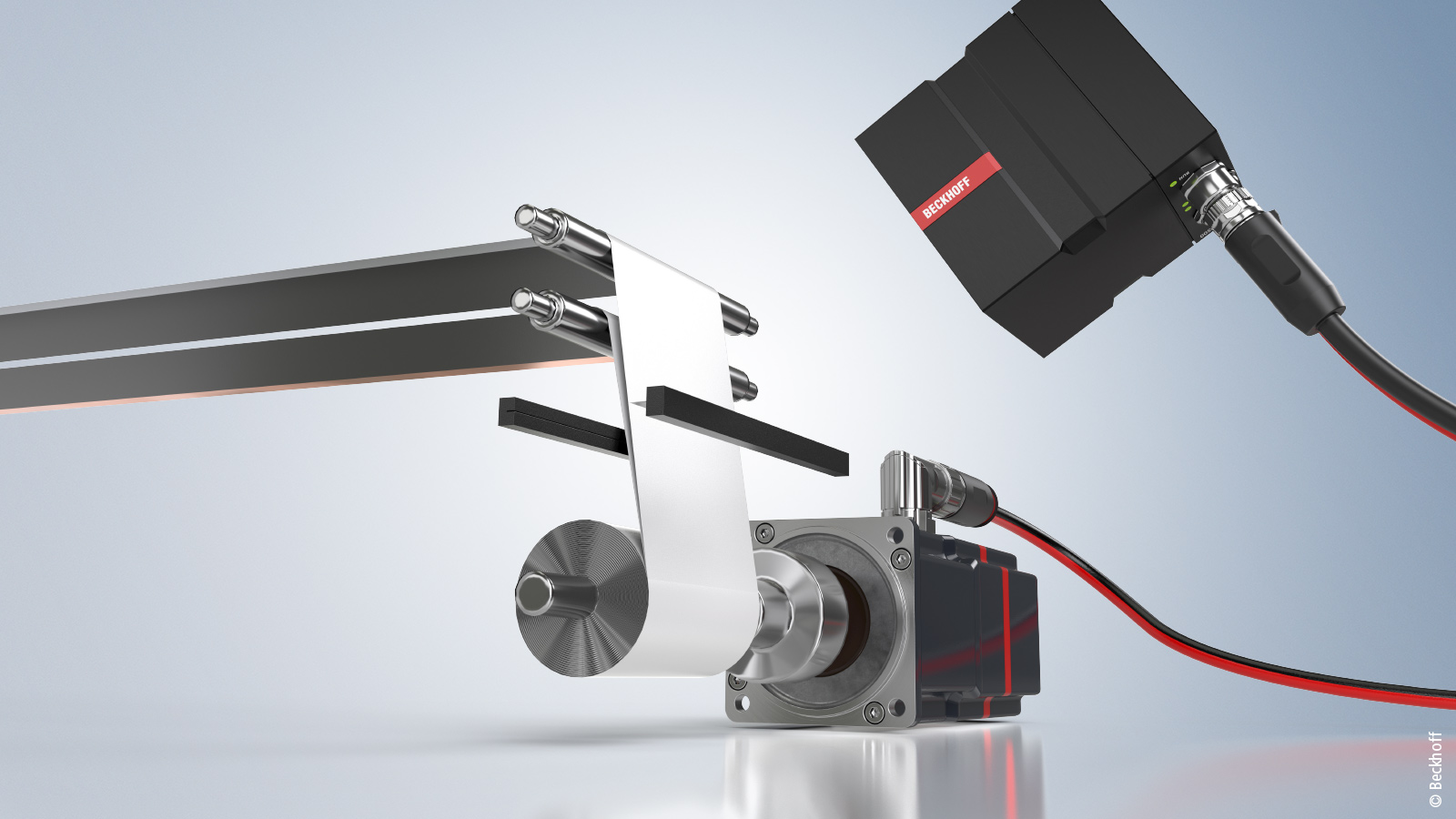
基于 PC 的控制技术可为所有电池生产过程带来优势,尤其是对于精度和速度要求极高的方形电池或圆柱电池的叠片和卷绕工序。圆柱电池生产中使用的卷绕工序包括将一个正极片、一个负极片和两个隔膜卷绕成一个裸电芯,然后将电芯放入金属外壳中。在卷绕收卷时,精确的料带对齐度控制是关键,这需要确保各个料带的精确定位。这就需要机器视觉系统与数控系统之间能够完美协作。基于 PC 的控制技术可将图像处理直接集成到控制平台中,从而优化了与运动控制系统的同步。另一个优势是 EtherCAT 高速通信系统,通过其超高速数据传输和精确时间戳功能,在与传感器、执行器或机器视觉硬件通信时不会出现时间损失。通过 XFC 极速控制技术,甚至可以实现 I/O 响应时间小于 100 µs,因此能够在实现高产出的同时确保卷绕过程的高精度。
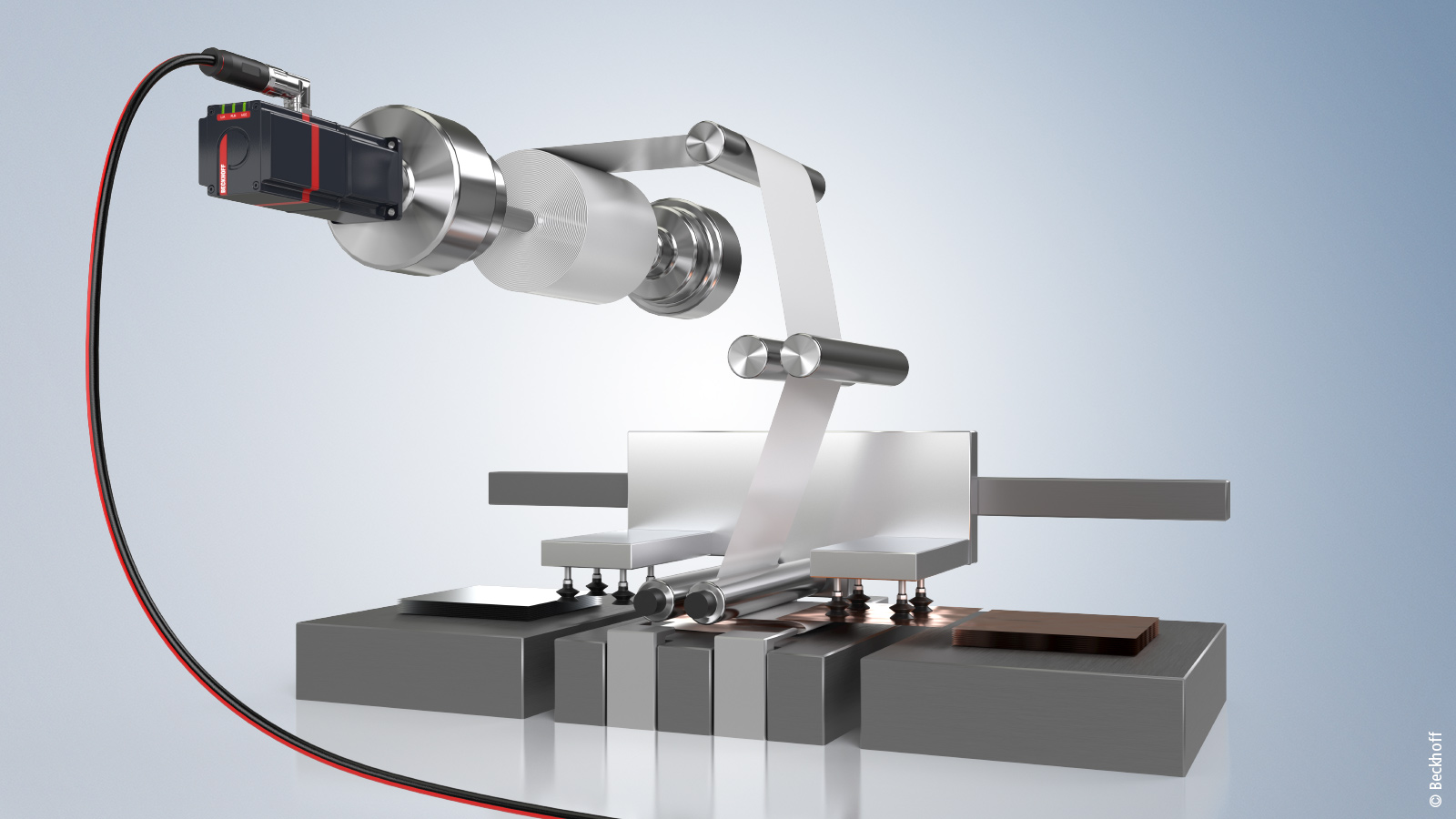
软包电池一般采用叠片工艺进行生产:正极或负极材料极片放置在隔膜之间,例如,采用 Z 型叠片工艺。Z 型叠片工艺与圆柱电池的卷绕工艺类似,高精度和高速度是关键。
通过将所有控制功能整合到高性能的 PC 平台上,在电池叠片过程中,即使是高度复杂的运动控制任务也可以真正高精度地完成,从而能够集中且同步地控制大量轴。机器人运动学也可以无缝集成到控制系统中。其它运动控制软件功能包括快速、高精度地同步连续的时钟过程。在硬件方面,新的自动化解决方案也为软包电池的组装带来了优势:例如,可以使用分布式伺服驱动系统取得 Z 型叠片工序中使用的传统驱动技术。这些系统将伺服驱动器直接集成到电机中,节省了控制柜中的宝贵空间。将动力和反馈系统整合在一根电缆中的 EtherCAT P 解决方案的使用进一步减少了设备的占地面积。
更多信息




