
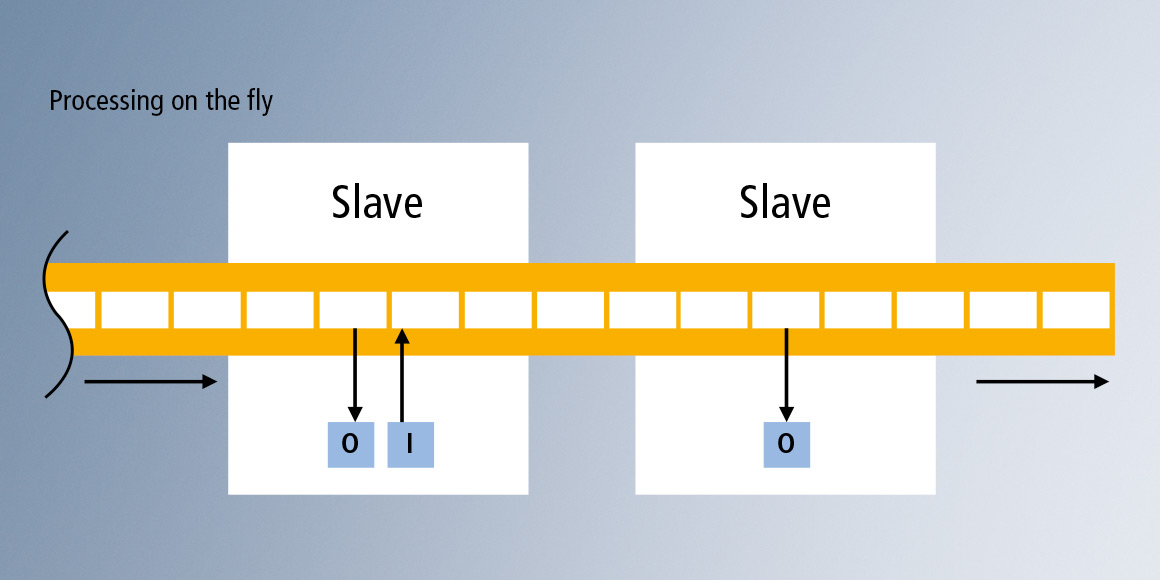
以 100 Mbit/s、1 Gbit/s 和 10 Gbit/s 速度飞速处理报文
EtherCAT G 基于成功的 EtherCAT 技术运行原理,同时将数据速率提升到 1 Gbit/s 或 10 Gbit/s。EtherCAT 协议本身保持不变,和以前一样,网络中的所有设备都会收到由 EtherCAT 主站发送的报文。每个 EtherCAT 从站都会以“on the fly”的方式读取寻址到该设备的数据,并将其需要交换的数据插入到继续向下游传送的帧中;现在,所有这一切都以 1 Gbit/s 或 10 Gbit/s 的速率进行。硬件产生的延迟是造成报文处理延迟的唯一因素。在子网段中的最后一个设备或者末端分支识别到开放端口时,利用以太网物理层的全双工特性将报文传送回主站。
EtherCAT G 和 EtherCAT G10 仍然保持 EtherCAT 的所有特性。带有三个或者四个端口的设备( 拓扑扩展模块)方便用户灵活配置网络拓扑,并完全满足设备结构的需求。可选的机器模块可通过热连接功能接入系统或者从系统中移除。网络诊断功能可以最小化设备的停机时间并提高可用性。内置的分布式时钟仍可确保设备小于 100 ns 的高精确同步性能。
直达 I/O 层的实时以太网
- 灵活的拓扑结构
- 出色的诊断功能
- 小于 100 ns 的精确同步性
- 非常简单的组态
- 低系统成本
- 性能卓越
- 集成功能安全特性
- 符合 IEEE-802.3 标准
EtherCAT G:扩展了 EtherCAT 技术的应用领域
高性能,高复杂性 — 1000 个轴的刷新周期为 30 μs,2000 个数字量 I/O 的刷新周期为 15 μs
EtherCAT 技术的出色性能满足了几乎所有行业用户对工业通信的各类需求 — 从高动态机床、复杂的包装系统,到物流中心。机器视觉、状态监测与类似 XTS 及 XPlanar 的创新传输系统都依赖于可靠地将每个节点每个循环产生的几百字节的过程数据进行传输,而这要求循环时间小于等于 1 微秒及高数据带宽。采用 EtherCAT G,诸如上述系统和应用仅需一台 EtherCAT G 主站控制,并同时与其他自动化设备和驱动器进行协同。为 EtherCAT G 开发的最新分支控制器模式可以满足日益增长的对集成大量设备的扩展系统的更短循环周期的需求。如今,即使是更大型的系统也可由一个中央主站进行同步和运行。


测量技术
- 超采样技术可以采集更高分辨率的信号,并与控制周期无关
- 采样频率为 100…50 ksamples/s
运动控制
- 大量伺服(耦合)轴的高动态运动控制及精确同步

XFC
- 极速控制技术
- I/O 响应时间 < 100 μs
- 采用 EtherCAT G/G10 实现更高分辨率
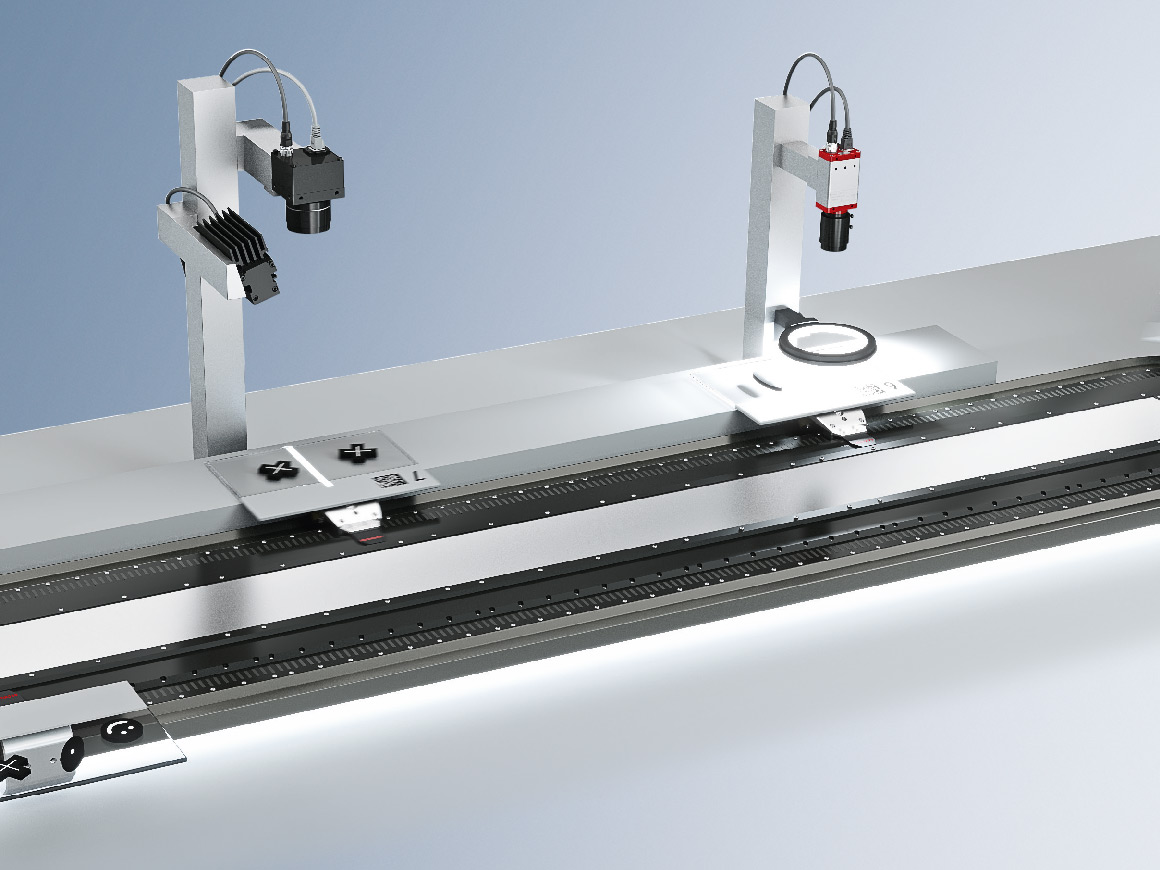
机器视觉
- 传输由高速帧速率采集到的高分辨率图片
- 过程同步触发图像采集
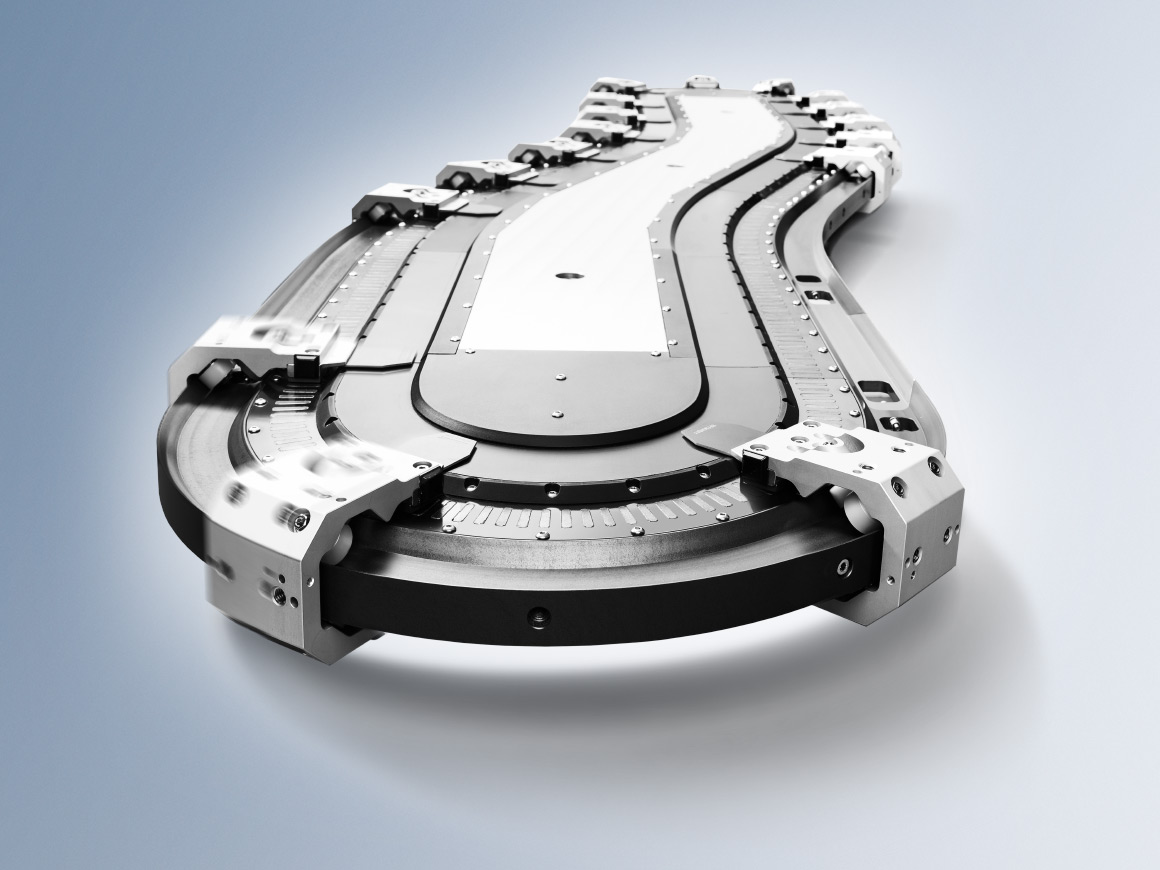
XTS 磁悬浮输送系统
- 以非常短的循环时间传输动子的实际位置和设定值(每米 XTS 轨道产生 25 Mbit/s 的数据)
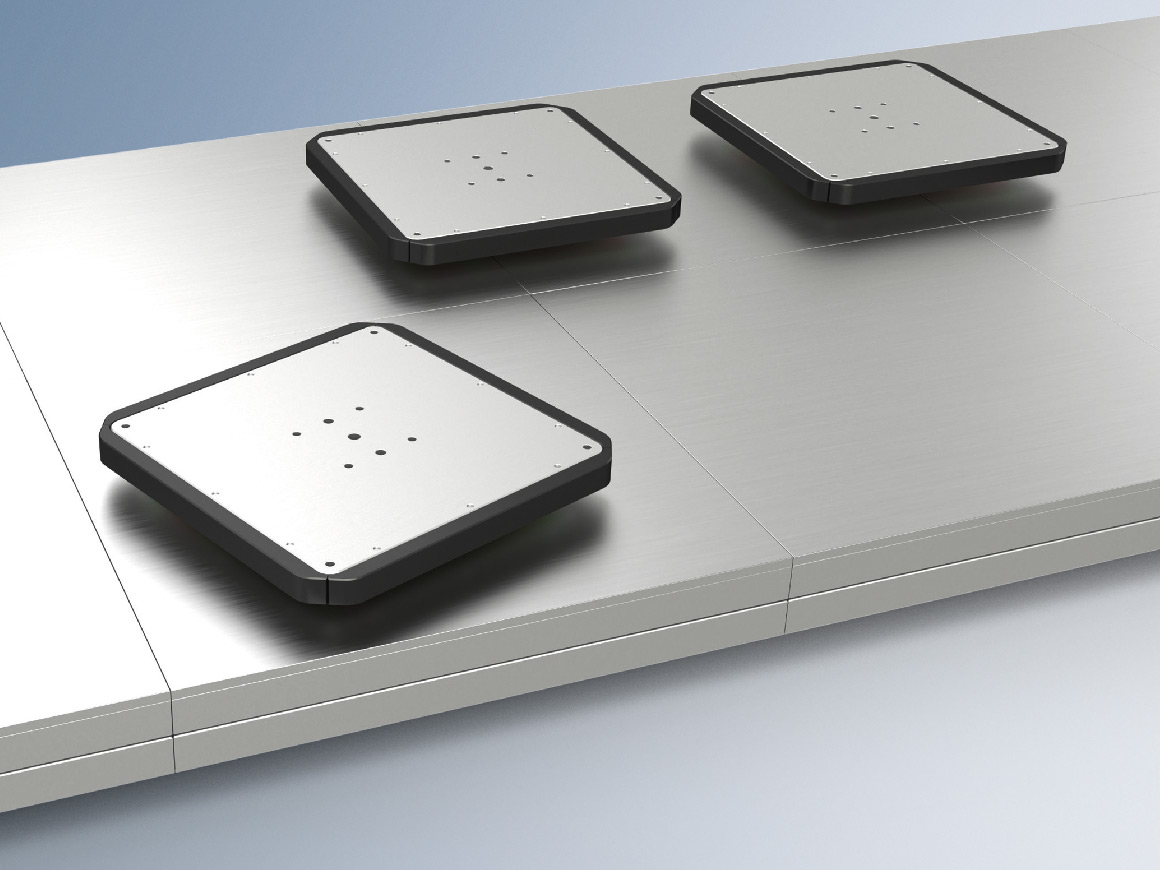
XPlanar 平面磁悬浮输送系统
- 六自由度无限可变定位,要求高数据速率及快速响应时间
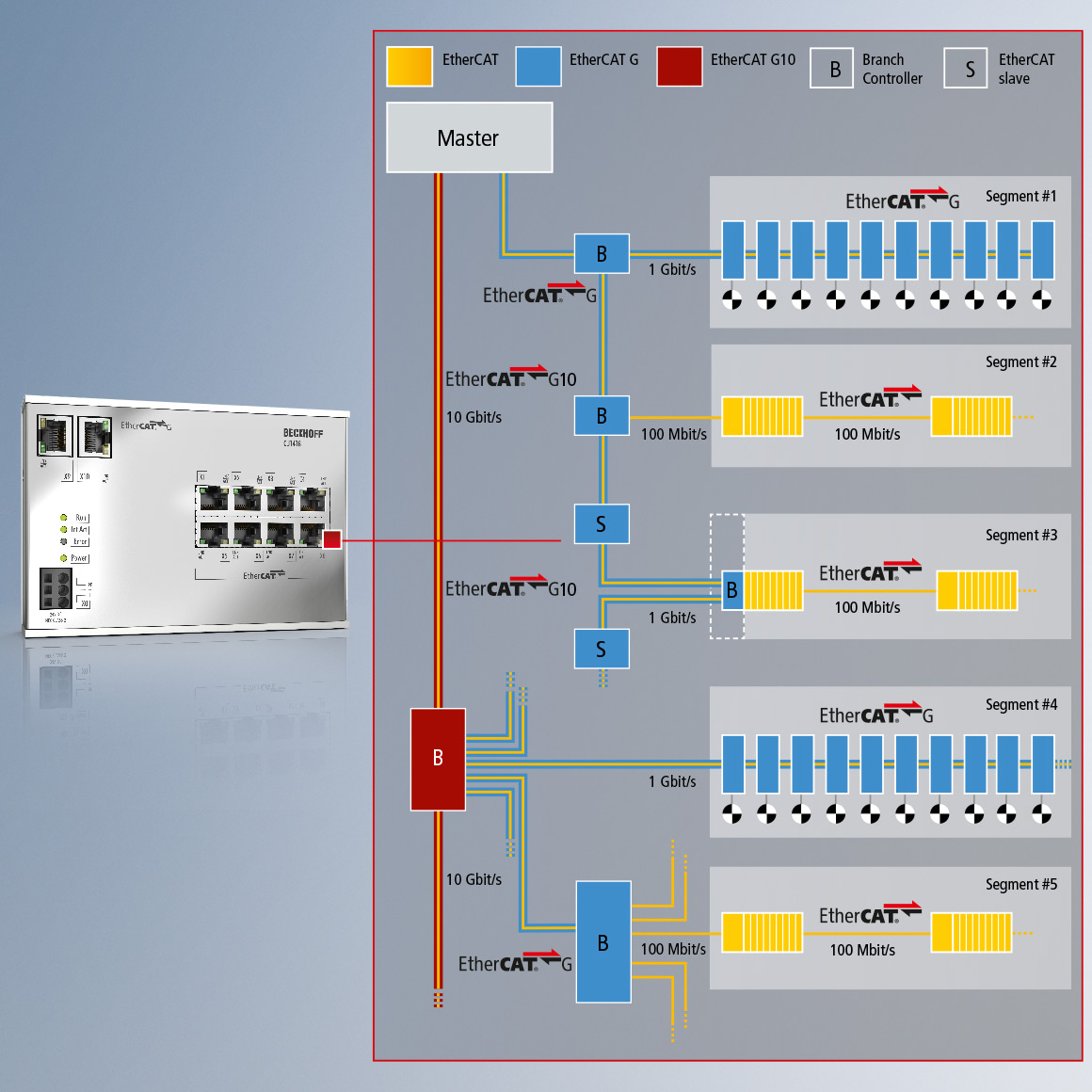
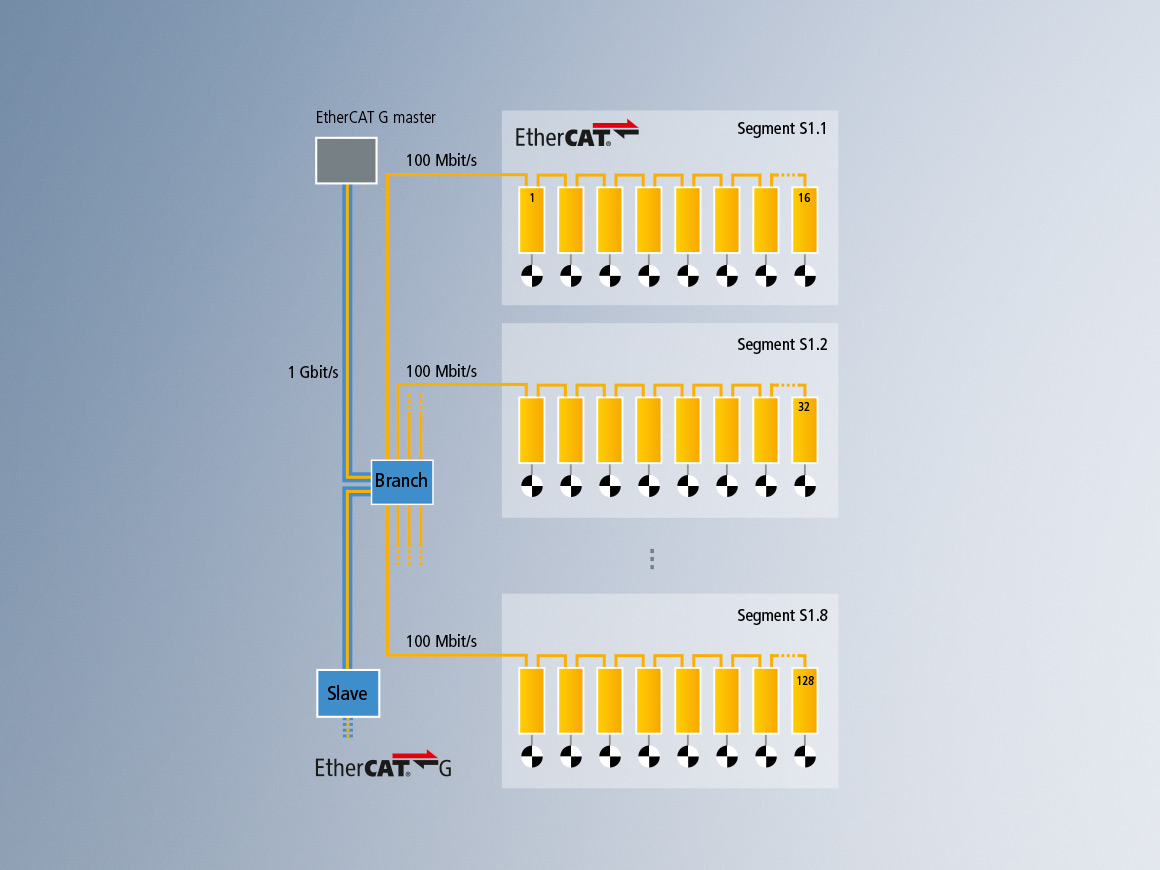
EtherCAT 分支管理
- 在 EtherCAT G 网络中集成百兆设备及网段
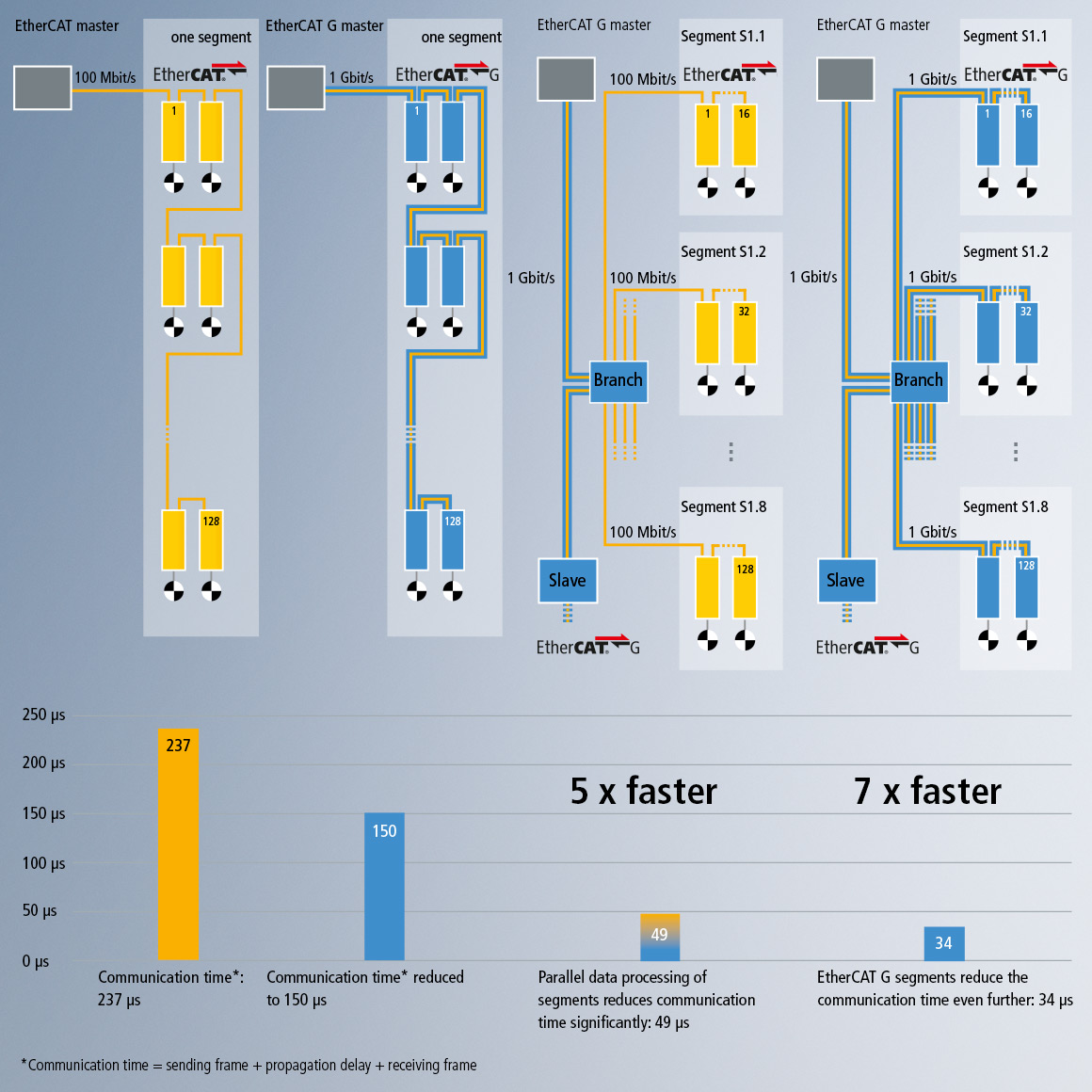
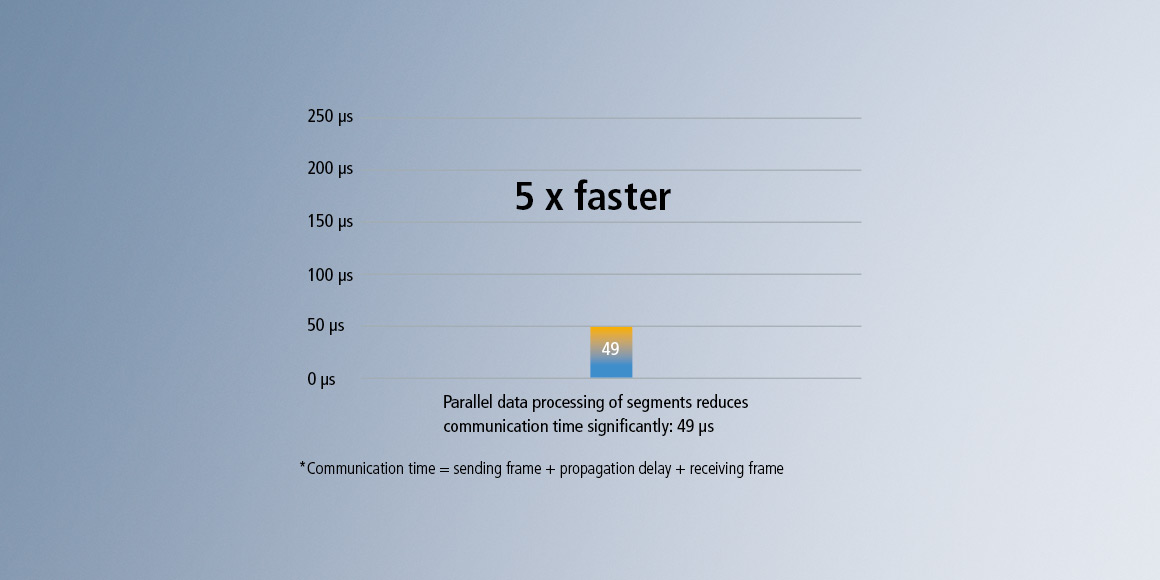
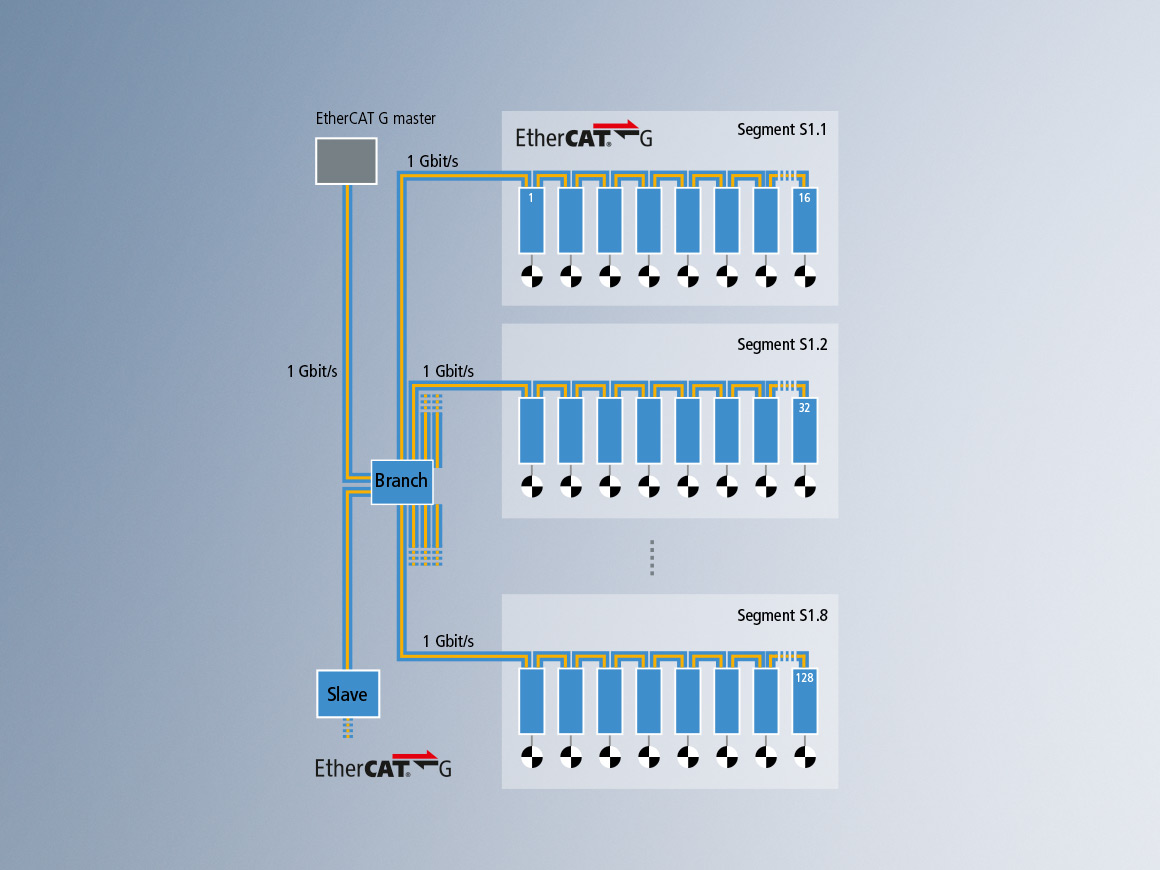
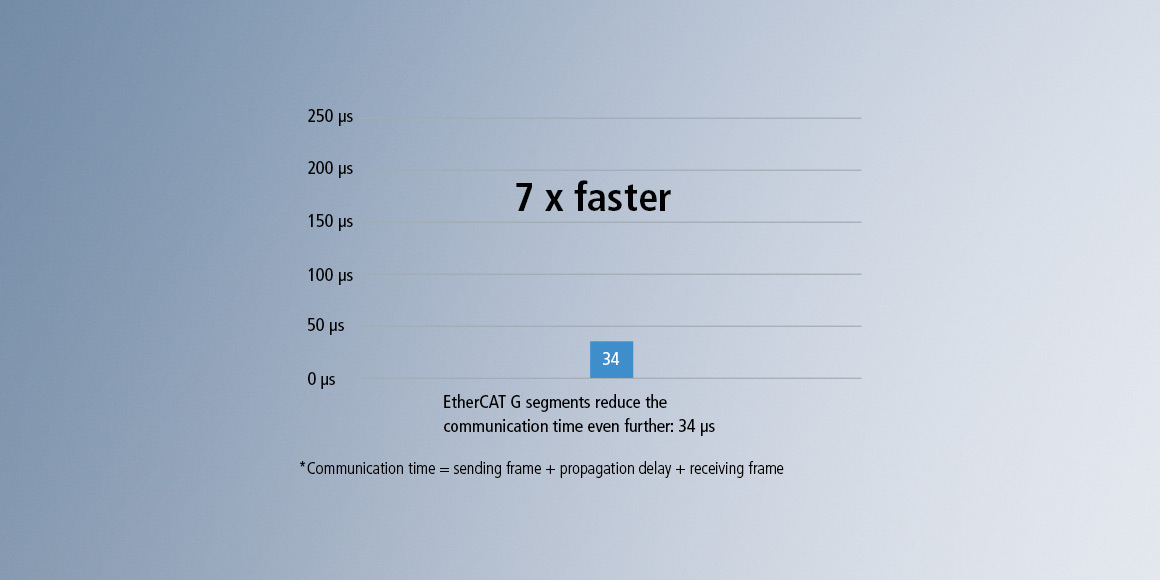
- 并行处理各网段数据,显著缩短延迟时间
- 仍然支持通用的诊断和同步功能
EtherCAT 是工业自动化行业中领先的通信标准,这意味着今天的设备制造商们可以从广泛的、不同层次的、成千上万的产品中选择互相兼容的设备。设备的兼容性是 EtherCAT G/G10 技术扩展的核心。专门为此而设计的新型分支模型可以将百兆 Ethernet 网段集成到 EtherCAT G 网络中。这些网段中的流量转发基于优先和/或时间驱动。由于每个分支都被认为是一个单独的 EtherCAT 网段,因此报文并不需要顺序通过所有的网段。相反,这些网段被并行处理,显著减少了大型网络的延迟时间。同样,从 EtherCAT G 到 EtherCAT G 分支的结合为应用提供了便利。与 EtherCAT 一样,分支控制器可以通过 EtherCAT 主站进行配置,而无需使用其他配置工具。分支控制器支持诊断和分布式时钟同步功能,并透明地将数据转发到所连接的网段中。在创建网络拓扑时,具有多路分支的分支控制器为用户提供了极大的灵活性,任何现有的 EL、ELX 及 ELM 端子模块都可以通过 EtherCAT G 耦合器的 E-bus 端轻松接入系统。
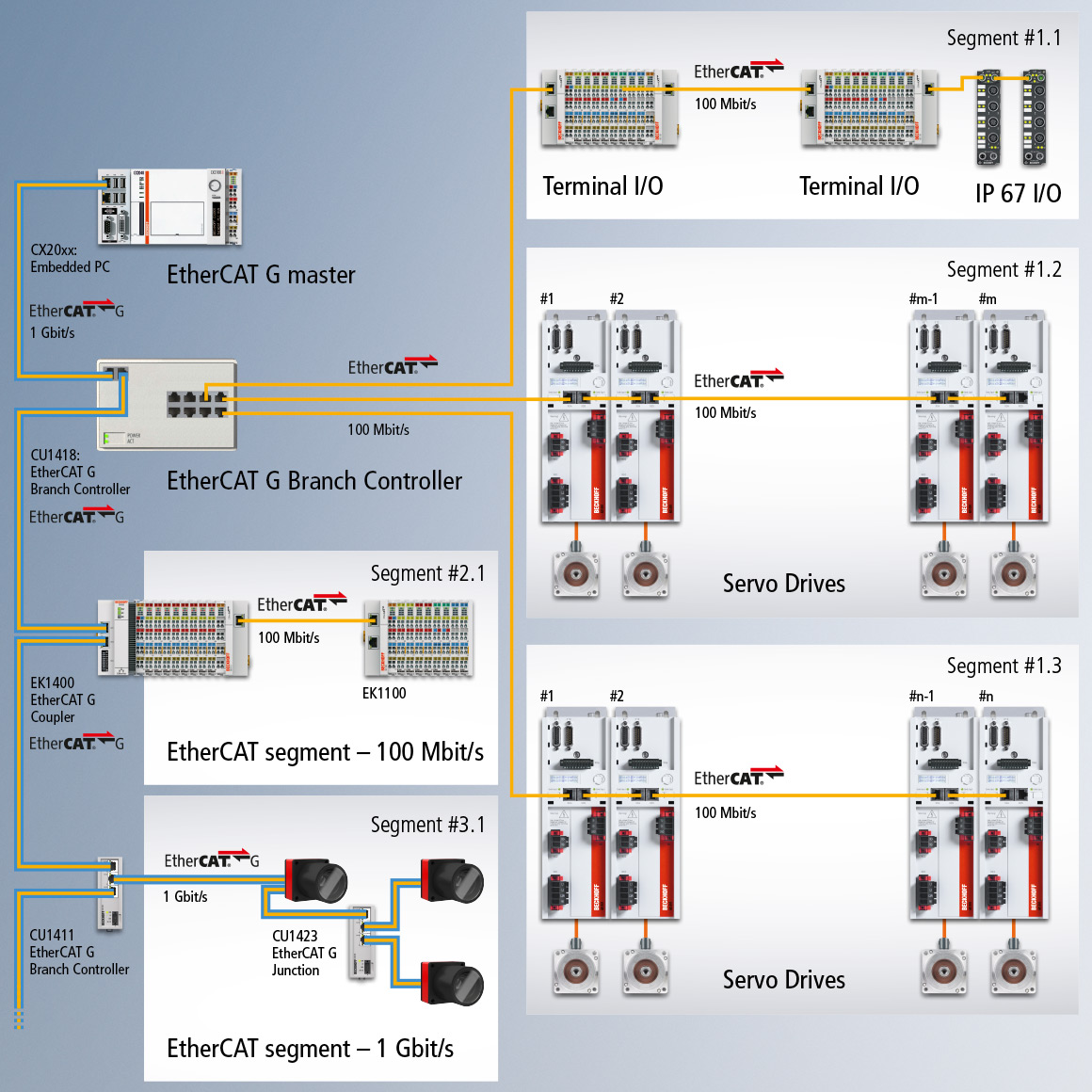
系统规模从百兆扩展到万兆
任何配置有标准千兆网口的倍福工业 PC 都可以作为 EtherCAT G 主站。TwinCAT 负责端口控制,对于用户来说,这与之前的应用并没有什么区别。EtherCAT 和 EtherCAT G 通过一个 1 个端口的 CU1411 分支控制器实现互连。分支可以以百兆速率或者千兆速率运行,具体取决于其所连接的设备。
8 端口的分支控制器 CU1418 可以支持更多数量的分支,因此也支持更多种类的拓扑结构。此外,最多可以支持 8 个分支作为独立的 EtherCAT 或者 EtherCAT G 网段运行,并确保即使在连接大量设备下仍然具有较短的循环时间。而 EtherCAT G 拓扑扩展模块 CU1423 被设计为在不改变传输速率的情况下扩展给定网段的网络拓扑结构,它也可以支持没有分支的功能。在搭建一个 EtherCAT G 网络时,可以使用 EtherCAT G 耦合器 EK1400 连接所有倍福的 EtherCAT 端子模块。此外,通过使用 EK1110 扩展模块可以扩展总线节点并作为 EtherCAT 网段独立运行。
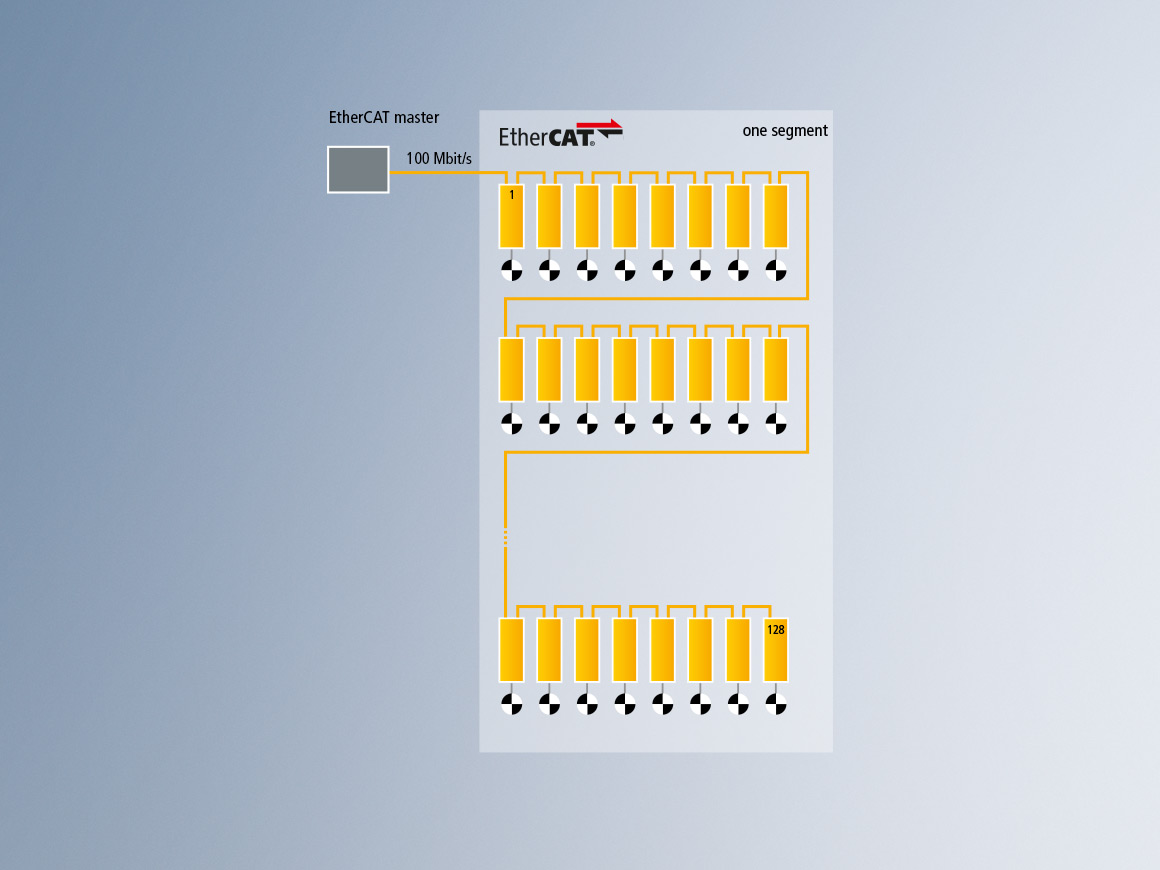
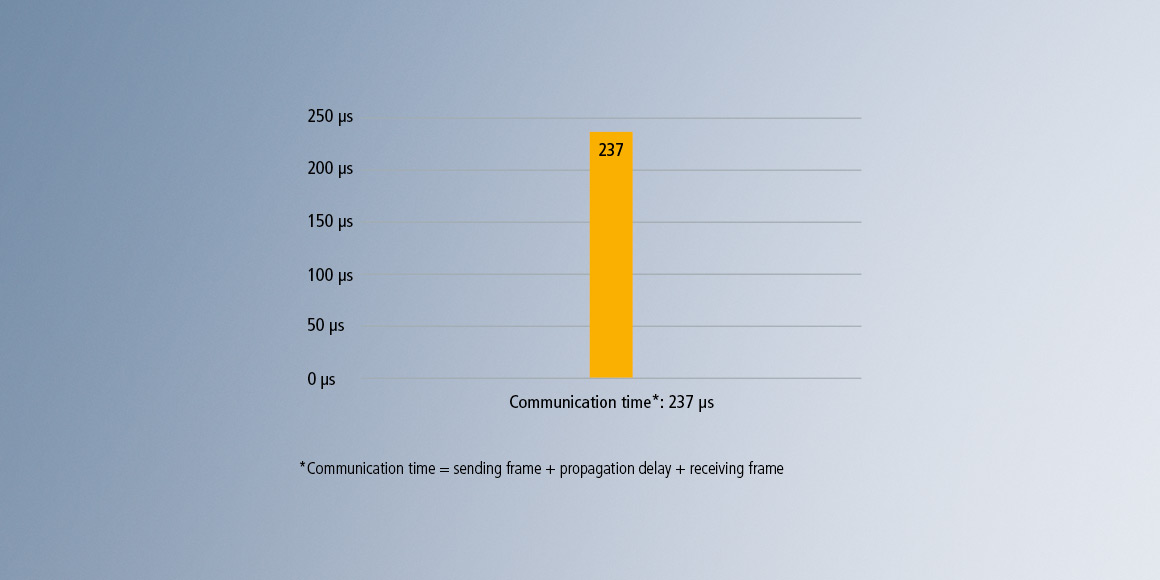
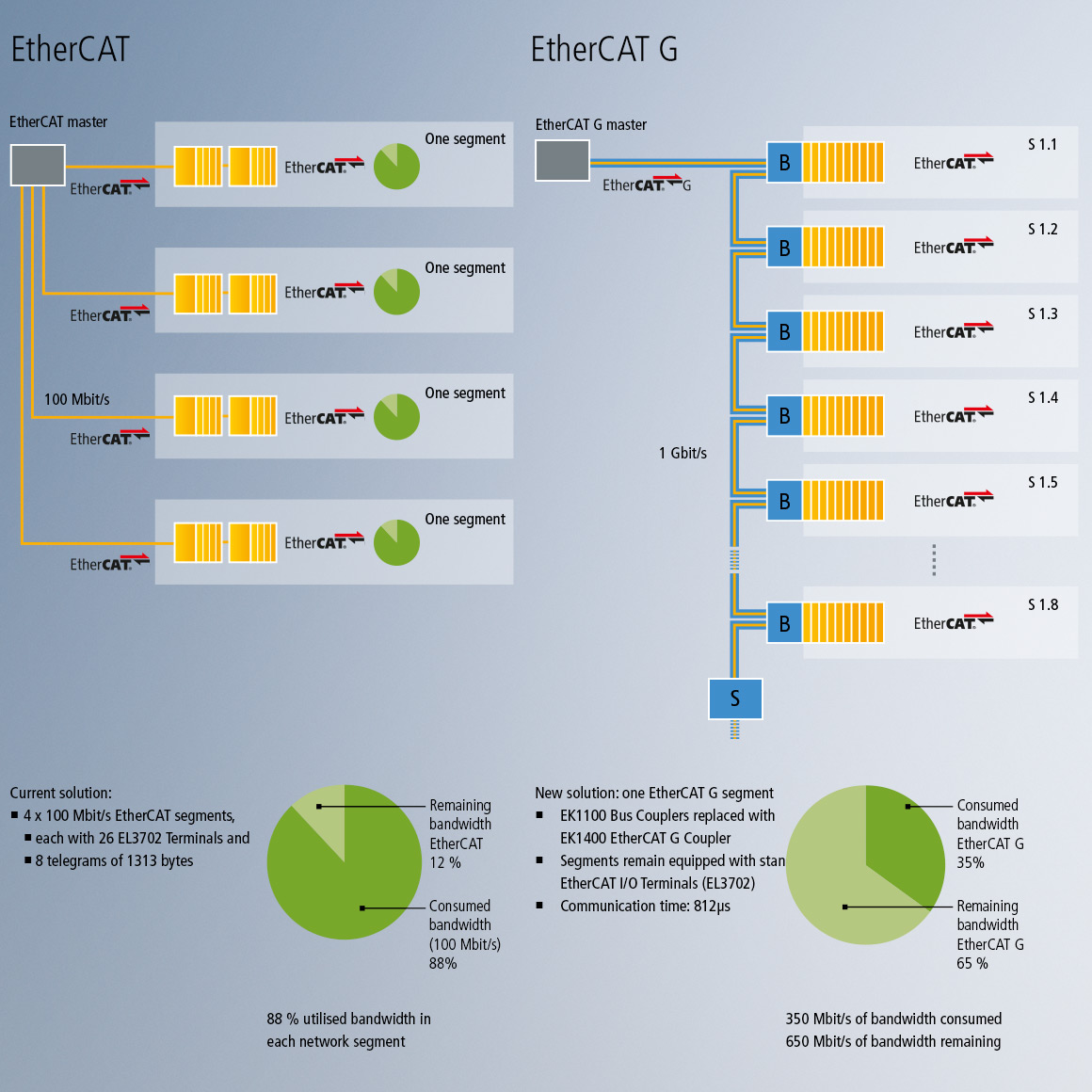
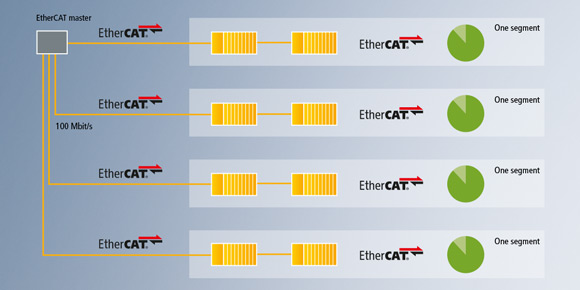
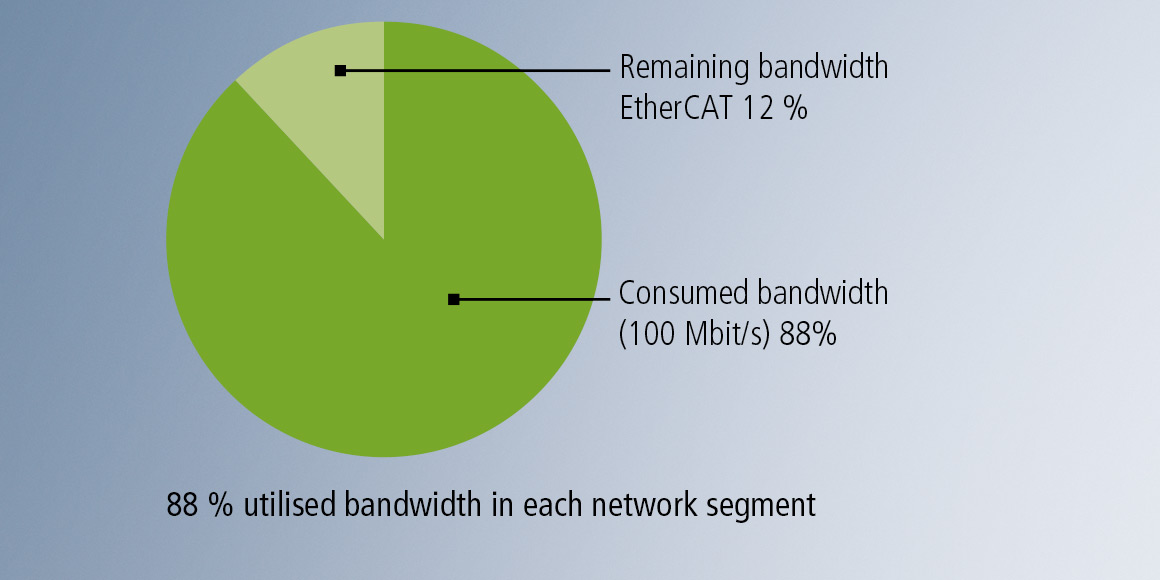
配备 EtherCAT 主站的解决方案
- 4 x 100 Mbit/s EtherCAT 网段
- 每个网段带有 26 个 EL3702 端子模块和
- 8 个 1313 byte报文
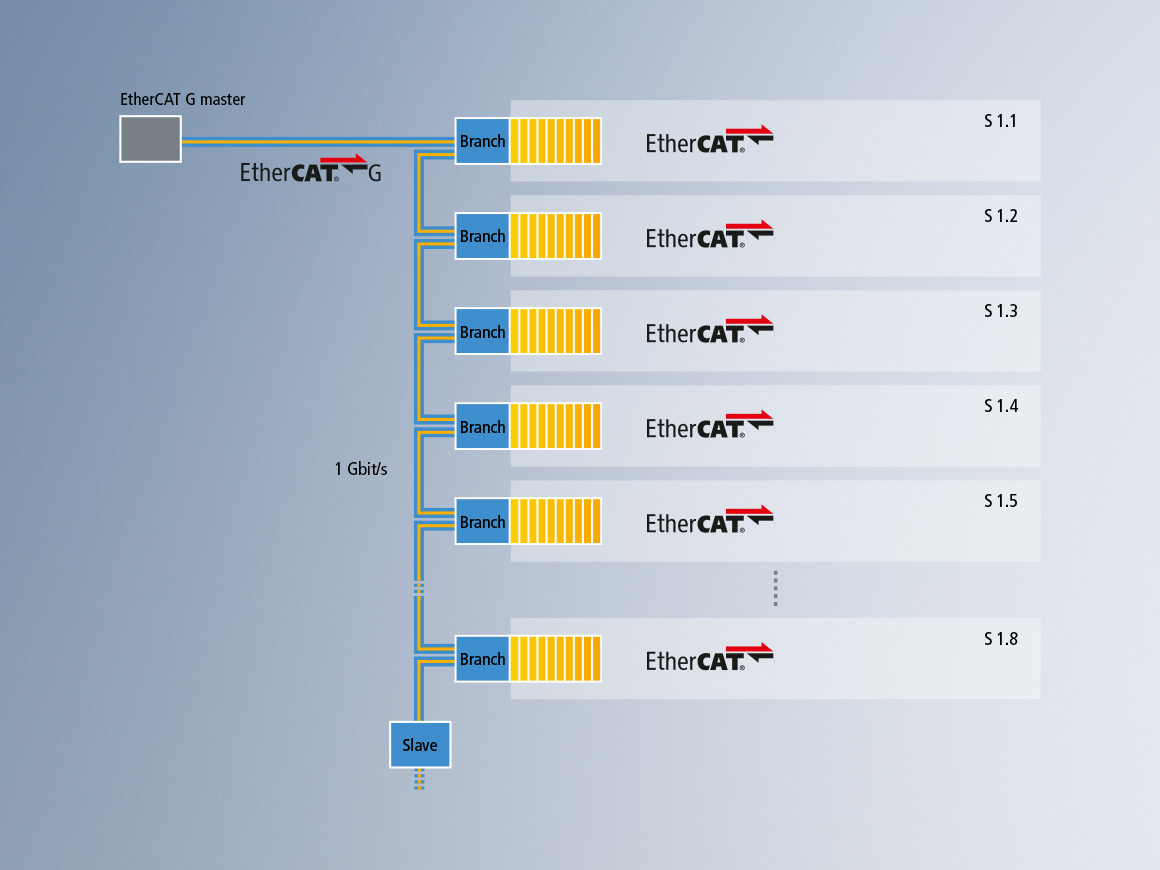
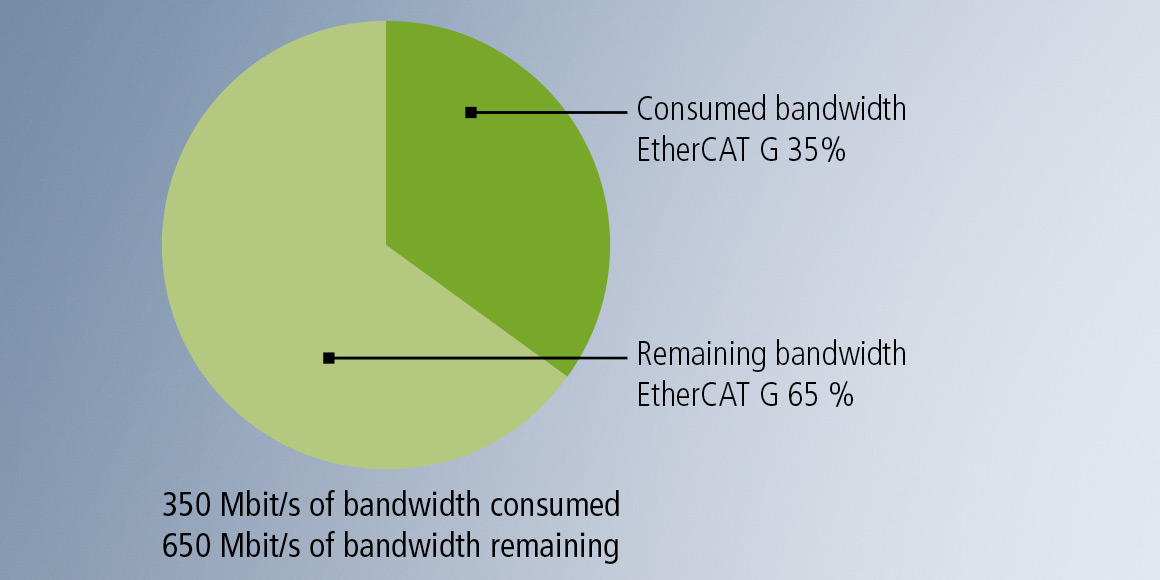
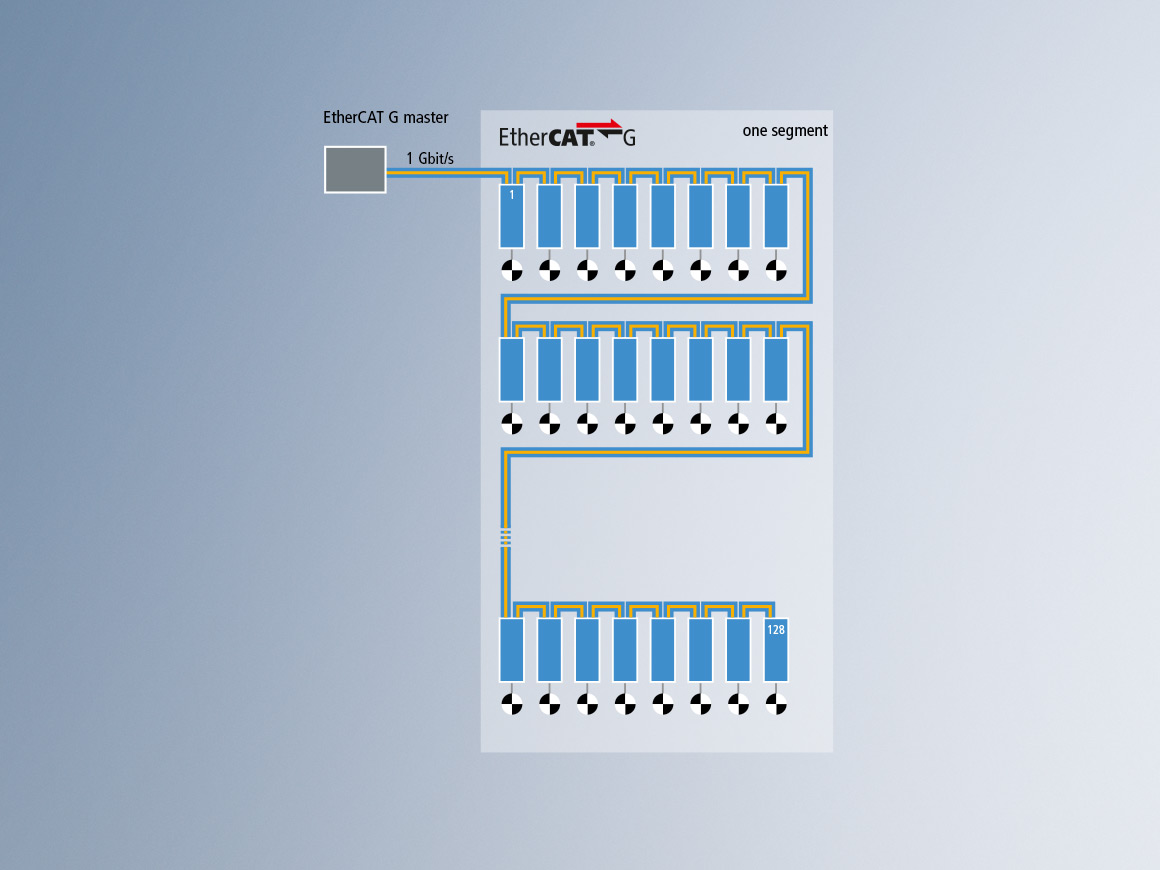
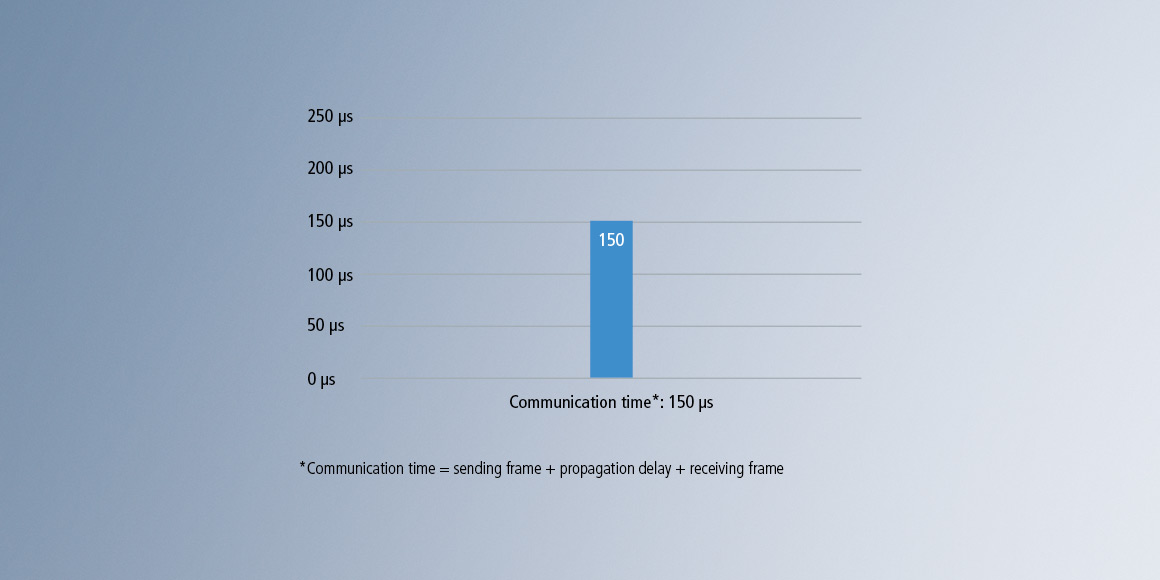
配备 EtherCAT G 主站的解决方案
- 一个 EtherCAT G 网段
- EtherCAT G 耦合器 EK1400 替代 EK1100 总线耦合器
- 配备标准 EtherCAT IO 端子模块(EL3702)的网段
- 通信时间:812 μs
EtherCAT G 产品

EK1400 | EtherCAT G 耦合器
EK1400 EtherCAT G 耦合器用于连接 EtherCAT G 与 EtherCAT 端子模块(ELxxxx)。一个站点由一个 EK1400 耦合器、任意数量的 EtherCAT 端子模块、一个 EL9011 总线末端端子模块或一个 EtherCAT 扩展端子模块 EK1110 组成。耦合器具有与分支控制器相同的功能。

CU1411 | Infrastructure, 1-port branch controller, EtherCAT G, 24 V DC, RJ45
The EtherCAT G branch controllers enable transparent conversion of transmission rates of EtherCAT G and EtherCAT. The CU1411 has two marked ports for integration into an EtherCAT G network. An EtherCAT and/or EtherCAT G segment can be coupled via a further branch port.

CU1418 | Infrastructure, 8-port branch controller, EtherCAT G, 24 V DC, RJ45
The EtherCAT G branch controllers enable transparent conversion of transmission rates of EtherCAT G and EtherCAT. The CU1418 has two marked ports for integration into an EtherCAT G network. Eight EtherCAT and/or EtherCAT G segments can be coupled via a further branch port.

CU1423 | Infrastructure, 3-port junction, EtherCAT G, 1 Gbit/s, 24 V DC, RJ45
The 3-way EtherCAT G junction enables topology expansions without changes in transmission rates. Line, tree or star – EtherCAT G supports almost any topology. The 3-port CU1423 EtherCAT G junction provides a compact solutions to cascade an EtherCAT network.

FB1400 | EtherCAT G 板载式控制卡
EtherCAT G 板载式控制卡提供基于 FPGA 的完整的 EtherCAT G 连接。FB1400 适用于实现 EtherCAT G 连接。它与 EL9820 EtherCAT 评估套件兼容。

FB1450 | EtherCAT G10 板载式控制卡
EtherCAT G 板载式控制卡提供基于 FPGA 的完整的 EtherCAT G 连接。FB1450 适用于实现 EtherCAT G10 连接。它与 EL9820 EtherCAT 评估套件兼容。

ZK1096-8191-0xxx | Industrial Ethernet/EtherCAT G/G10 cable, Cat.6/Cat.6A, PUR, 4 x 2 x AWG26, fixed installation
M12, plug, straight, male, 8-pin, X-coded – RJ45, plug, straight, male, 8-pin