TwinCAT Vision
作为基于 PC 的控制技术专家,倍福将其成熟且非常成功的 TwinCAT 产品系列整合到 TwinCAT Vision 集成式图像处理解决方案中。这款新软件的面世也很好地说明了图像处理的重要性越来越高,它已经成为提高制造机械质量的关键因素,特别是在工业 4.0、质量优化及跟踪与追踪等应用中。TwinCAT Vision 软件将所有视觉硬件整合于一体,构成面向工业图像处理的整体解决方案。
基于 PC 的控制为这些应用提供了一个理想的解决方案:TwinCAT Vision 将图像处理功能添加到整合了 PLC、运动控制、机器人、高端测量技术、物联网及 HMI 的通用控制平台中。这样可以显著简化开发工作,因为相机配置和编程任务能够在熟悉的 PLC 环境中实施。另外,与图像处理相关的所有控制功能都可以在 Runtime 系统中精确实时同步,从而消除了延迟,实时执行图像处理算法,与传统机器视觉解决方案相比有了质的飞跃。设备制造商可以借助 TwinCAT Vision 将图像处理任务完全集成到中央控制系统中,为更先进的机器设计铺平道路,从而能够满足未来的市场需求,提高市场竞争力和投资安全性。
TwinCAT Vision 的优势
- 竞争优势:将图像处理功能整合到总的控制系统中可以提高设备效率。机器视觉功能可以实现卓越的实时应用性能。
- 轻松实现工业 4.0 解决方案:将 PLC、运动控制、测量技术和机器视觉功能与物联网以及分析功能集成在同一个平台上,能够更轻松地实现工业 4.0 应用。
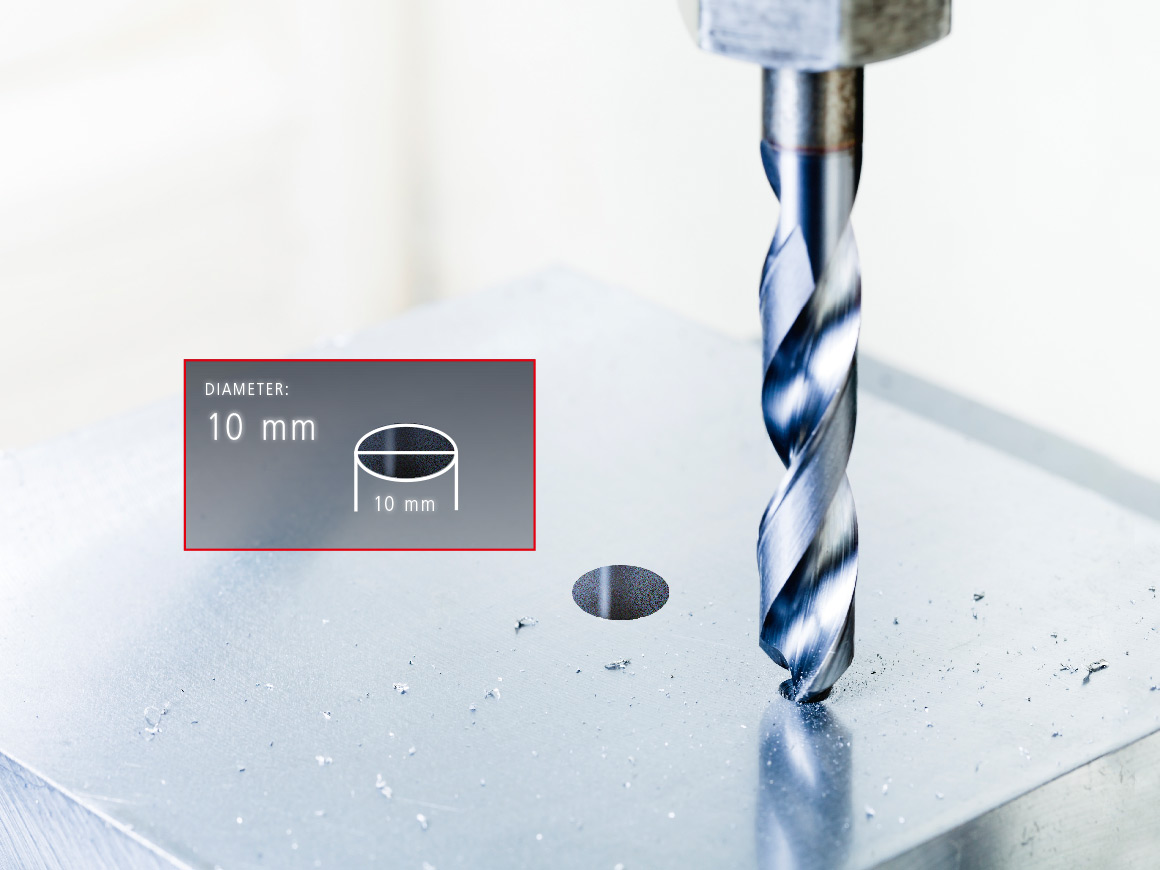
- 提高生产效率:高精度测量和精确的光学检测确保符合工艺参数。
- 品质保证:诸如跟踪与追踪等应用支持全面的产品质量追溯。
- 开放性:TwinCAT Vision 遵循的是倍福开放式控制技术理念。
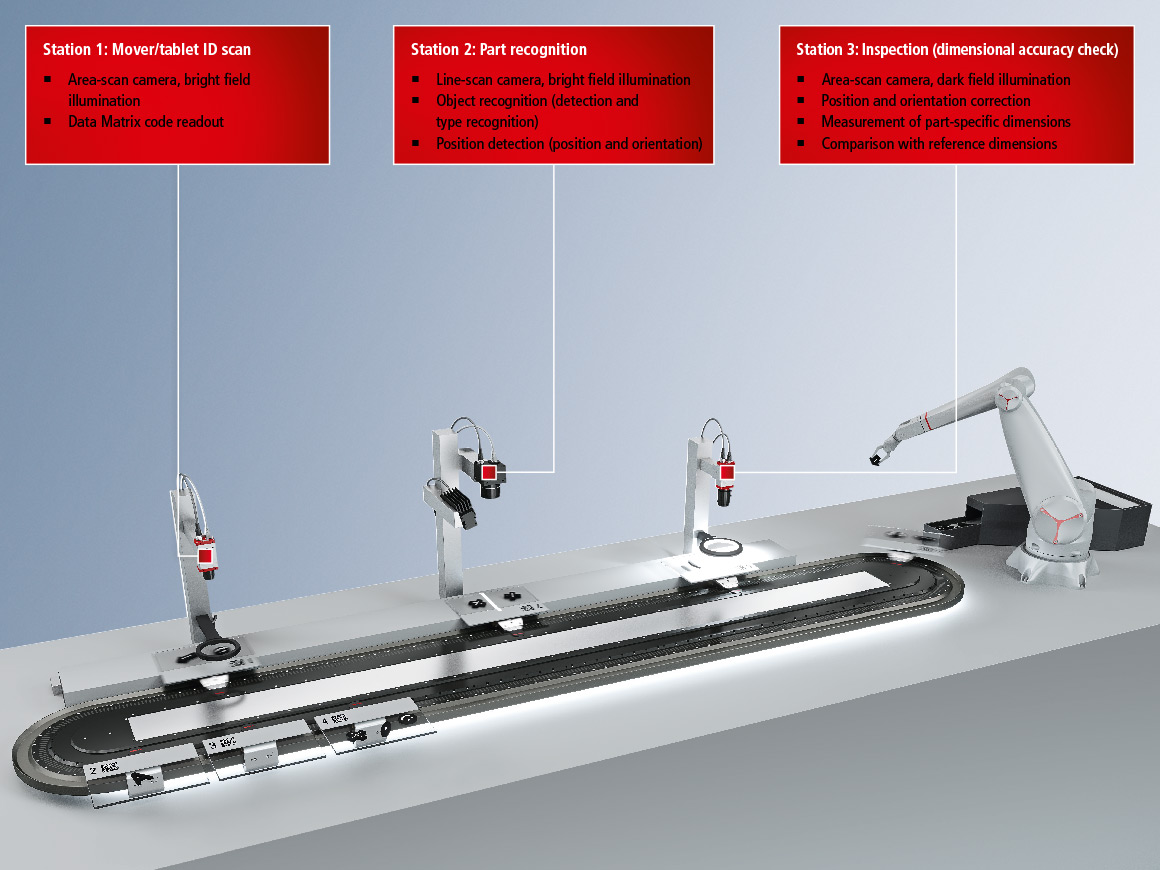
- 独立于硬件:TwinCAT Vision 支持带 GigE Vision 接口的线阵扫描和面阵扫描相机。
- 软件扩展:允许用户访问原始相机数据,并轻松合并自己的图像处理算法。
- 云连接:TwinCAT Vision 集成在 TwinCAT 控制平台中,它可与 TwinCAT IoT 和 TwinCAT Analytics 直接连接。这样可确保与云服务器轻松通信,能够访问基于云的服务,并简化工业 4.0 应用。
- 实时应用:将 PLC、运动控制、机器人、高端测量技术和机器视觉集成在同一个平台上可以实现卓越的实时应用性能,显著提高设备效率,同时避免运动控制和机器人控制中不必要的延迟。



模块化设计:从开发环境到 Runtime
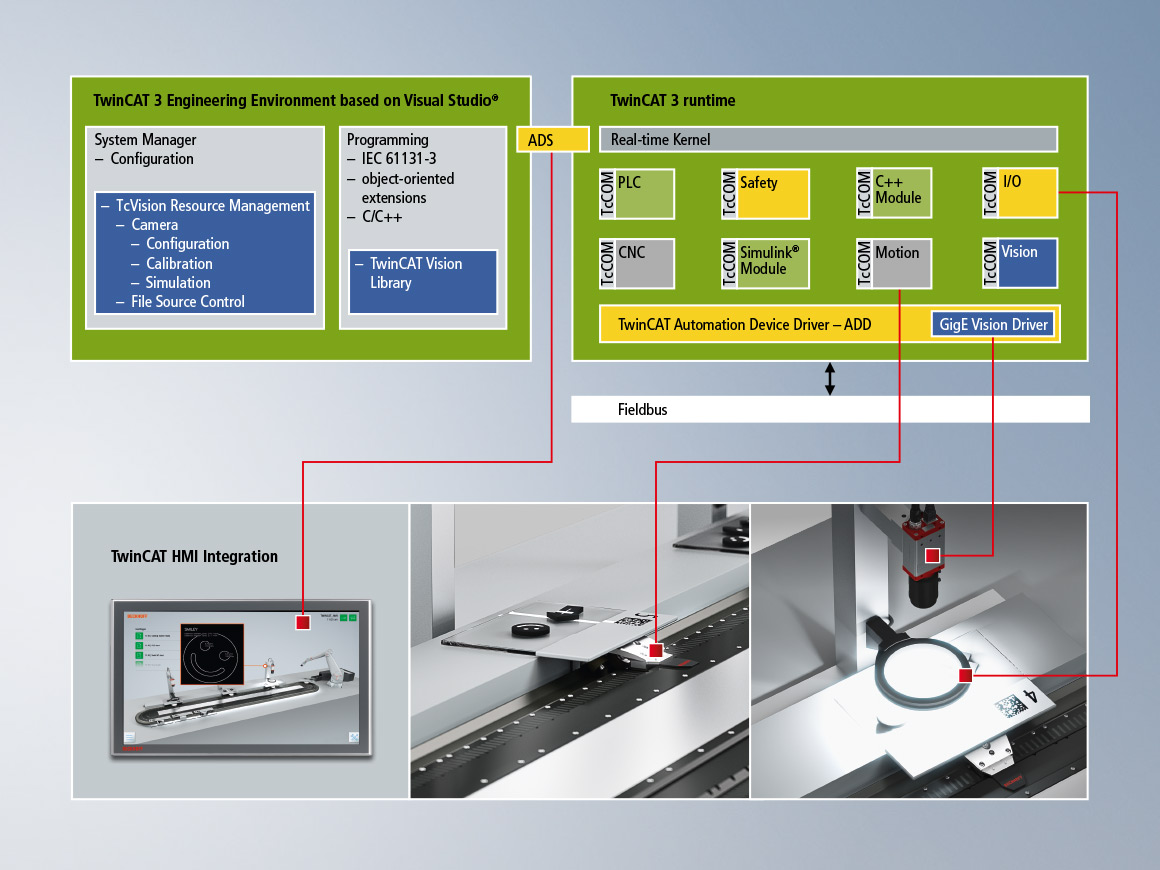
TwinCAT Vision 被直接集成到 TwinCAT 开发环境中。可以在新的 Vision 节点下轻松添加或配置相机,并在该节点下进行校准。它也能够捕捉相机图片流以及输入录制,而不是直接捕捉相机实时图像。或者,也可以加载各种格式的图像。这意味着,即使没有访问相机,用户仍然可以开发和实施图像处理程序。图像处理顺序采用 PLC 编程语言以及使用所提供的各种图像处理算法库直接在 PLC 中编程。将图像处理功能集成到 PLC 中表示分析链在 TwinCAT Runtime 系统中执行,从而能够与在 PLC 上运行的其它进程(如运动控制)进行通信,不会出现延迟。此外,它还提供 PLC 编程中常用到的所有调试选项。中间结果可以随时在开发环境或 TwinCAT HMI 中显示。
简化开发工作,提高 Runtime 性能:
- 轻松配置相机
- 开发采用 PLC 编程语言实现
- 分析链完全包含在 PLC 中
- 处理无延时
在熟悉的环境中轻松配置机器视觉
除了运动控制和 I/O 配置之外,TwinCAT Vision 还可以在 TwinCAT 开发环境中配置相机。GigE Vision 相机可以集成在新的 TwinCAT Vision 节点下面,根据 GenICam 标准进行配置。所有相机设置都可以在这里定义,并可以在相机实时图像中直接查看结果。此外,也可以在开发环境中校准相机。用户可以从一系列校准模式中进行选择,包括他们自己的用户特定模式。而且,他们可以直接查看结果。TwinCAT Vision 与 TwinCAT 和 Visual Studio® 完全集成。支持如窗口停靠和源代码管理系统等所有人们所熟知的功能。
一个工具即可实现配置和编程:
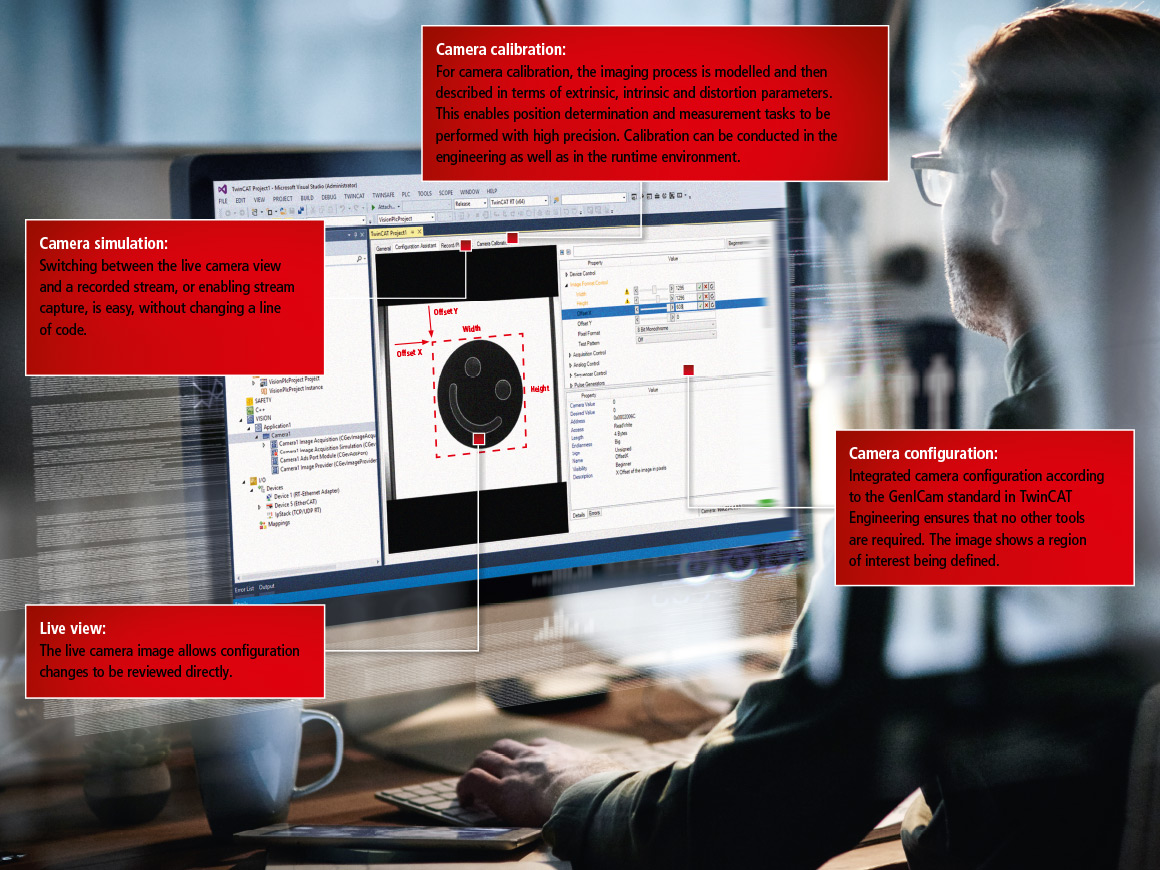
- 在开发环境和 Runtime 中校准相机:对于相机校准,先对成像过程进行建模,然后根据外部、内部和失真参数进行描述。这样能够高精度地完成定位和测量任务。校准可以在开发环境以及 Runtime 环境中进行。
- 集成相机配置功能:相机配置根据 TwinCAT 开发环境中的 GenICam 标准进行集成,因此无需使用其它工具。图像显示正在定义的感兴趣区域。
- 实时显示:相机实时图像允许更改配置,以便直接查看。
- 相机仿真:可以轻松在现场相机查看和录制的图像流之间切换,或者启用图像流捕捉,无需修改一行的代码。
视觉与控制功能:所有功能都已针对同一平台进行编程
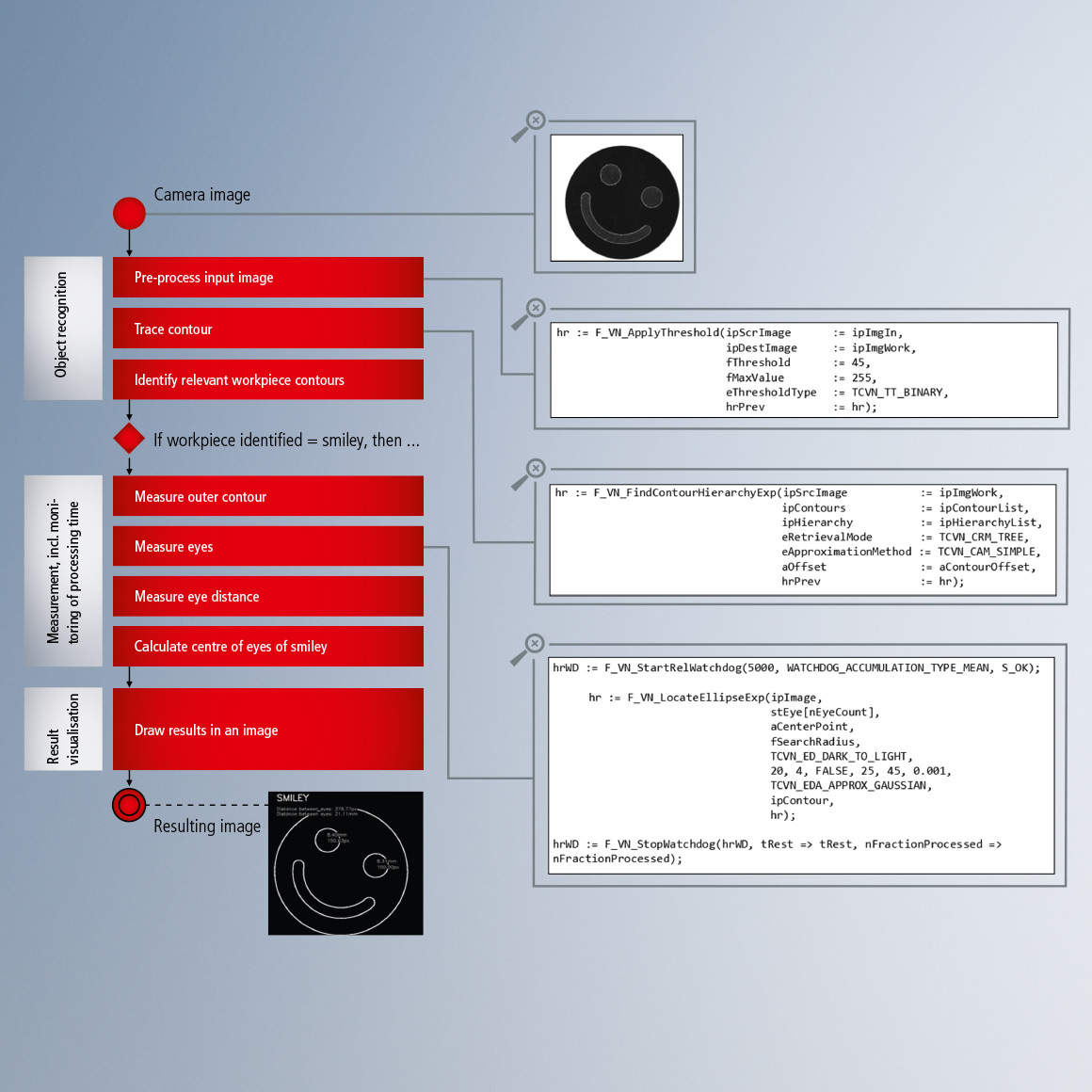
图像分析在 PLC 中编程。包括轮廓检测、轮廓识别、关键点特征提取以及测量功能在内的种类丰富的功能块和功能库可供使用。诸如插入行或文本等附加信息可以插入到 PLC 内的图像中。分析链上任何一点的中间状态都可以在开发环境或 TwinCAT HMI 中作为一个图像查看。用户还可以使用 PLC 支持的常用调试选项(例如,监视变量和设置断点),并且可以在线修改图像处理算法中的代码。
整合所有功能:
- 对象检测
- 测量,包括监测处理时间
- 结果显示