




在智能制造大背景下,制造商们对机械设备在整合机器视觉、电能管理、设备数据采集等方面的要求越来越高,同时也对生产质量、设备性能及产量也寄予了很高的期望。而以前使用的解决方案在性能上已经达到上限。若想要在未来保持国际竞争力,就须将成熟的理念付诸实践。例如,增加应用中使用的各种系统接口数量产生的初始成本。这里需要先进的机器对机器(M2M)通信和云端连接;即设备制造商将基于工业 4.0 的生产理念整合到设备中。
倍福凭借基于 PC 的控制技术和 EtherCAT 技术,为装配单元、搬运系统、测试设备和机器人应用提供高性能控制解决方案。基于 PC 的解决方案采用模块化设计,并可根据性能需求精确扩展,适用于控制和监测单台设备以及整条生产线的完整过程链。因此,所有的生产步骤,从进料、接合(焊接、涂胶等)、装配和测试到物料搬运与机器人集成,都可以通过倍福工业 PC 的硬件平台 和 TwinCAT软件平台统一实现。由于所有控制功能都在软件中映射,可以根据不断变化的需求对生产单元或生产线进行调整,只需花费很少的工程工作量即可集成新的功能。不管是单件小批量生产还是大批量生产,都可以随时进行转换。
硬件和软件的开放式接口也为设备制造商在设计设备时提供了高度灵活性。它们能够整合各种不同的设备,以及优化 M2M 通信的机器和设备的联网。作为开放、兼容的自动化接口的积极推动者,倍福还支持 OPC UA 和 MQTT 安全云连接的通讯标准,并为基于云的通讯和数据分析提供相应的软件工具。因此,生产优化和产能提升、能源效率、状态监测、预测性维护和机器学习成为设备自动化不可缺少的部分。
倍福针对搬运、装配以及机器人技术领域的技术亮点

基于 PC 的控制技术原理
通过基于 PC 的控制技术,倍福可为搬运、装配和机器人领域的所有应用任务提供不同性能等级的综合系统解决方案。
基于 PC 的控制系统由一台多核工业 PC、针对现场级的 EtherCAT 实时以太网系统以及用于开发和实时控制的 TwinCAT 软件组成。电机及驱动器等驱动产品,包括相应的软件模块,是控制解决方案不可或缺的组成部分。倍福的控制和驱动产品都采用模块化设计,在性能、设计和价格方面具有可扩展性,可根据具体的应用需求进行优化调整。倍福工业 PC 搭载多核和众核处理器,性能非常强大,因此 TwinCAT 自动化软件可以在中央平台上执行诸如 PLC、HMI、运动控制、安全技术、机器人技术、测量技术、机器视觉、通讯及物联网功能等所有设备功能。硬件和软件都采用开放式接口,支持所有常见的现场总线系统和软件协议,以及集成的物联网接口(例如,通过 OPC UA 或 MQTT),可以实现从现场级到云端的连续通讯。
符合 ISO50001 标准的电能管理和用于设备及产品质量保证的预测性维护也可以通过使用合适的 EtherCAT 端子模块和 TwinCAT 软件模块实现。倍福在技术上的另一个优势就是它所发明的并将继续为其控制面板、驱动器、现场总线端子模块和 UPS 组件进行深度开发的单电缆技术。它可以显著降低设计和布线成本以及空间需求。未来的云端工程和千兆 EtherCAT 已经在扩展今天的解决方案,以满足未来需求!
EtherCAT 可以提高精度,提升数据吞吐量
EtherCAT 是迄今为止速度最快的工业以太网技术之一,同时,它可提供纳秒级精度的同步。由总线系统控制或监测的所有应用都将从此大大获益。响应时间的显著缩短减少了处理步骤中的状态转换等待时间,从而显著提高了应用的效率。EtherCAT 系统结构还能降低控制器负载:相对于设定有相同循环时间的其它总线系统,能减少 25%-30%的 CPU 负载。如果使用恰当,EtherCAT 的出色性能可以带来更高的精度和更高的数据吞吐量,从而降低成本。
- 控制机器人运动
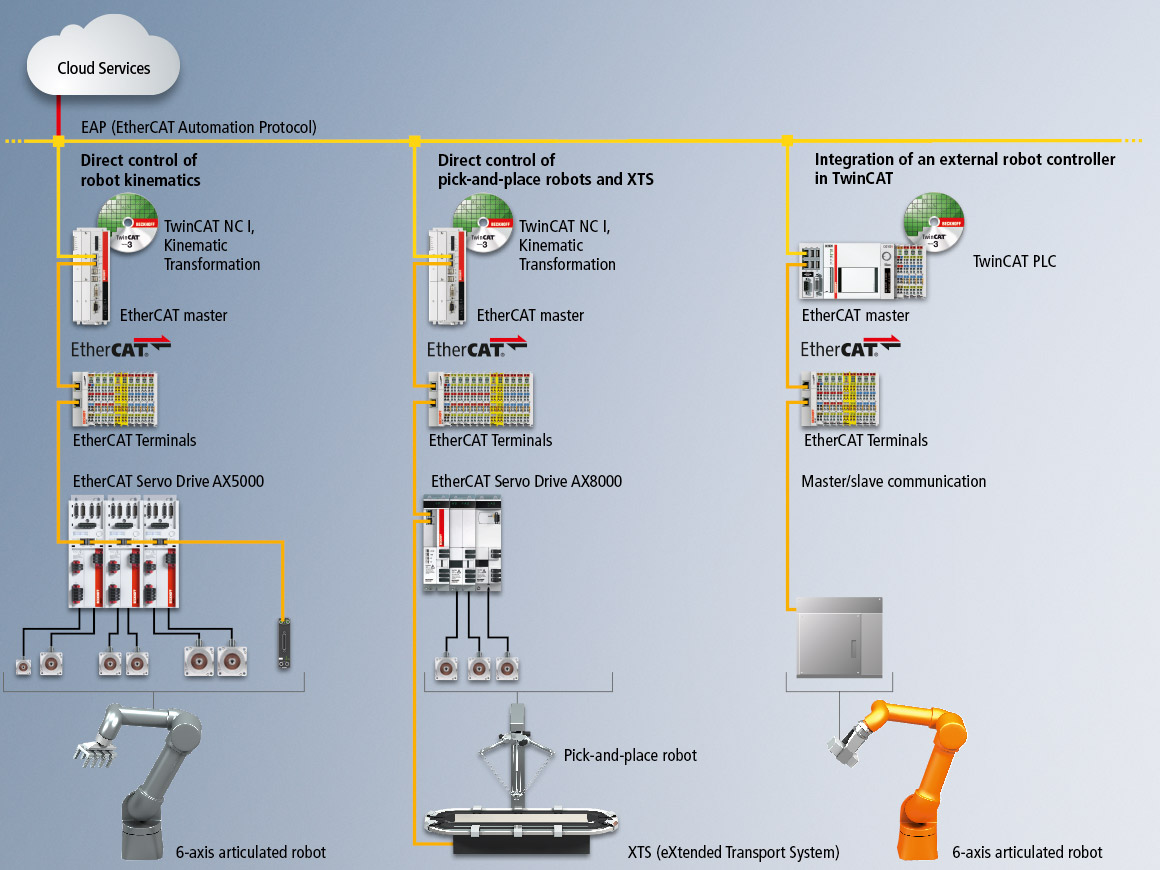
使用 TwinCAT 运动学变换功能库(TF511x),各种机器人运动可以使用 TwinCAT 直接控制。例如,轨迹规划和运动学变换直接在 TwinCAT 中进行。各种运动学系统已经存在;可以轻松集成客户专属组件。拾放动作也可以直接用 TwinCAT PLC 编程;可提供各种功能库用于实现此目的。例如,轨迹运动通过基于 DIN 66025 标准的 TwinCAT NC I 执行,即描述机器人运行的轮廓。 - 控制拾放机器人和 XTS 系统
一个 CPU 即可处理所有任务:TwinCAT 同时控制 XTS 系统和 Delta 机器人。用户在控制整个系统时只需要一个编程环境,控制器之间无需进行复杂通讯,从而优化了周期时间。 - 外部机器人控制器集成在 TwinCAT 中
TwinCAT 功能组件 TF5120 和 TF5130 是标准 TwinCAT PLC(TC1200)功能的扩展,为控制关节臂或 SCARA 机器人提供基础。机器人的行进指令通过 PLC 直接发送给机器人控制器。为 KUKA 机器人定义的接口是 mxAutomation(TF5120),而为 Stäubli 机器人定义的接口则是 uniVAL PLC(TF5130),能够直接由 TwinCAT 控制机器人。为用户带来的好处也是显而易见的:机器人应用的运动轮廓可以在 TwinCAT PLC 功能块内直接编程,无需使用专用的机器人编程语言。 - 控制通讯通过 EtherCAT 自动化协议(EAP)实现
机器人和设备之间的横向通讯或到中央主计算机的连接可以通过 EtherCAT 自动化协议(EAP)非常高效地完成。EAP 能够实现毫秒级实时通讯。该协议基于传统的以太网架构,且可以通过任何以太网介质(包括无线)传输。

ATRO:模块化工业机器人系统
ATRO 系统 ATRO 系统是一款模块化的工业机器人系统,可以根据不同的应用需求灵活组合,组装成造型最为匹配的机器人,适用于装配和搬运领域的不同应用。各种尺寸的标准电机模块与各种形状设计和长度的连接模块一起组装在底座模块上,用于实现供电和介质传输。设备制造商可以通过这种方式打造出最适合自己应用需求的运动学结构。
控制设备完全集在整个 TwinCAT 控制平台中,因此可以直接使用各种成熟的自动化功能。用于设备控制、机器人控制、功能安全、机器视觉、状态监测,或用于连接边缘控制设备或云系统的 PC 控制平台集成了所有功能。ATRO 模块化机器人可以与 XPlanar 和 XTS 直接结合使用,并将所有组件精确同步到机器人系统中,可以实现全新的设备方案。
ATRO 系统可为装配和搬运行业带来的主要优势包括:
- 模块化系统可以实现个性化和可灵活扩展的机器人解决方案
- 集成介质传输接口,无需外部软管组件
- 用于数据、电力和流体的传输接口可以实现即插即用的末端执行器
- 完全集成在 TwinCAT 控制平台中,可以使用各种成熟的自动化功能
- 每根轴都可以双向无限制旋转,因此可以优化定位路径,缩短工作节拍时间


使用 NCT 的 XTS 功能扩展开创了机器灵活性的新维度
通过无电缆技术 (NCT),XTS 从被动运输系统转变为主动搬运系统。借助 NCT 能够将能源和实时数据无线传输到 XTS 动子,从而增加系统设计的自由度和开创机器灵活性的新维度。在品种不断增加和产品生命周期缩短的背景下,NCT 帮助机器适用于尽可能多的用途,同时通过运输过程中的预处理减少其占地面积。NCT 可以在熟悉的 TwinCAT 环境中进行控制,并与任何标准的 XTS 系统结合使用。
对于装配和搬运技术,使用 NCT 的 XTS 成为一个灵活的多机器人系统:动子可以执行多轴运动,从而拾取、放置、转移、对齐和堆叠产品。由此,例如可以分离和再次合并产品流。此外,可以从未分拣的不规则产品输入流中拾取产品,然后进行分拣或直接放入最终包装。
动子也可以成为移动加工站:产品可以直接在动子上加热、对齐或转动,例如通过摄像头进行 360° 采集。借助适当的传感器,也可以在动子上记录测量变量,例如存在状态或重量。因此,测量任务不仅可以在正在进行的生产过程中执行,而且可以与加工站平行或在运输过程中执行。这就节省了备用加工站上进行供料和卸料的时间,从而缩短了整个生产时间,并显著提高了机器的效率。

MX-System 助力实现无控制柜自动化解决方案
MX-System 在设备和系统工程领域首次实现了无控制柜自动化解决方案。由模块化组件构成的底板和功能模块打造出完整的系统,它拥有控制柜具备的所有功能:供电、熔断器保护和配电、辅助电压的生成和监测、带输入输出的控制系统、电机和执行机构的控制以及现场设备连接层。MX-System 通过可自由选择的工业 PC、耦合器、I/O、运动控制、继电器和系统模块集成所有设备功能,这些模块可以根据具体应用进行配置和组合。
模块整体遵循设计一致性原则,符合各项国际标准,极大地减少了规划、装配、设备安装及维护工作。由于 MX-System 实现同样的需求所需的组件比传统控制柜的制造要少得多,因此在结构上比之前的解决方案更加紧凑, 不仅能够减少系统占地面积,同时还能提升系统利用率和灵活性。在控制系统生命周期的每个阶段,MX-System 相对传统控制柜都具有显著优势。
MX-System 可为搬运与装配行业带来的主要优势包括:
- 显著减少工程工作和装配时间
- 设备侧采用分布式排布和即插即用方式减少了接线工作
- 将诊断功能集成在整个系统中
- 简化设备生命周期维护


倍福单电缆技术可优化机械设计
每个机械设备制造商都很明白:更少的布线意味着更少的工作量、更低的成本以及更小的接线出错风险,让客户更加满意!单电缆技术将动力和反馈系统整合在一根电缆中,是倍福为机器人应用打造的理想解决方案。例如,可以减少动力电缆,节省时间和成本。由于无需使用电机反馈线缆,减少了系统布线对设备和控制柜空间的需求,为实现占地面积更小机械设备的设计做出了重要贡献。
EtherCAT P:针对现场级的单电缆自动化解决方案
用于连接如电机等设备的单电缆技术(OCT)是倍福多年来形成的标准,可将材料和调试成本减半。倍福又继续深入开发,推出了 EtherCAT P,即针对现场级的单电缆技术。EtherCAT P 将 EtherCAT 通讯与所连接的用电设备的电源整合在一根 4 芯标准以太网电缆中。此外,EtherCAT P 能够通过设备直接供电。保留了 EtherCAT 的所有优点,尤其是网络拓扑结构的自由选择。单电缆自动化显著简化了机械设计方面的系统布线工作,因为组件、端子盒及设备模块只需一根电缆即可连接。
倍福采用单电缆技术的伺服电机和驱动器可显著节省控制柜空间
采用单电缆技术的伺服电机给伺服市场带来了广泛而持久的变革,电机电流和编码器反馈只需要一根连接电缆。AX8000 多轴伺服系统支持 OCT;与 AM8000(标准)、AM8500(更高惯量)、AM8700(阳极氧化表面)及 AM8800(不锈钢)系列伺服电机结合,接线工作大大减少,只需使用一根标准的电机电缆,反馈信号也通过该电缆传输。与无传感器控制一样,无需使用额外的反馈电缆。控制所需的所有信息通过一个数字量接口可靠、无干扰地传输。

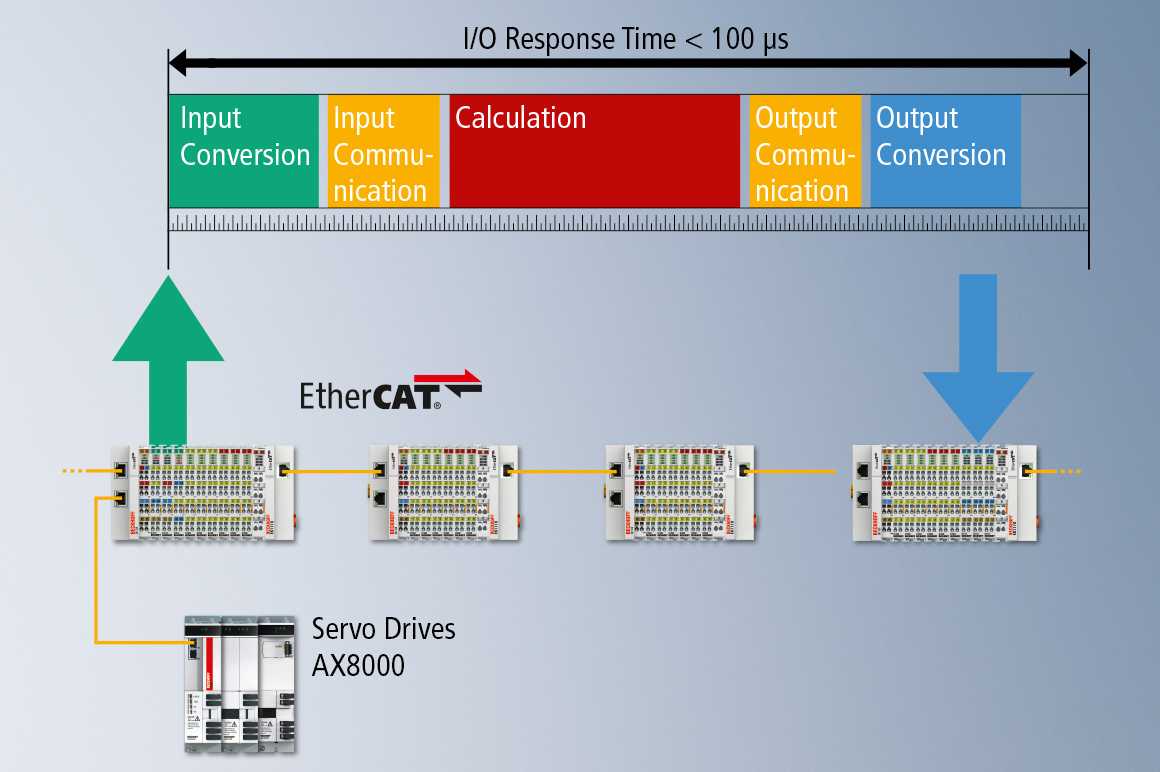
XFC 可以提高设备及生产单元的性能
倍福的 XFC 技术是一款速度超快的控制解决方案:XFC 基于高效的控制和通讯架构,包括高性能工业 PC、带有实时特性的超高速 I/O 端子模块、EtherCAT 高速工业以太网和 TwinCAT 自动化软件。采用 XFC 技术后,可以实现 I/O 响应时间 < 100 μs。因此,该技术为以前由于受技术限制而无法满足性能要求的用户提供了一种全方位提升控制性能的新理念。

作为基于 PC 的控制技术专家,倍福将其成熟且获得巨大成功的 TwinCAT 产品整合到 TwinCAT Vision 集成式图像处理解决方案中。这款新软件的面世也很好地说明了图像处理的重要性越来越高,它已经成为设备制造商及其客户衡量质量的决定性标准:特别是在工业 4.0、质量优化及跟踪与追溯等应用。
基于 PC 的控制技术在此提供了理想的解决方案:除了 PLC、运动控制、机器人技术、高端测量技术、物联网和人机界面之外,TwinCAT Vision 现在还将图像处理功能集成在统一的控制平台上。这样,用户能够在熟悉的环境中进行配置和编程,从而显著简化开发工作。此外,还能够实时同步与图像处理相关的所有控制功能,消除延迟,并实时执行图像处理算法。与传统的视觉解决方案相比,TwinCAT Vision 优势巨大:设备制造商可以借助 TwinCAT Vision 将图像处理任务完全集成到中央控制系统中,为更先进的机械设计铺平道路,从而能够满足未来的市场需求,提高市场竞争力和投资安全性。

EtherCAT G 可实现超快 I/O 速度
EtherCAT G 基于成功的 EtherCAT 技术运行原理,同时将数据速率提升到 1 Gbit/s 和 10 Gbit/s。EtherCAT 协议本身保持不变,和以前一样,网络中的所有设备都会收到由 EtherCAT 主站发送的报文。每个 EtherCAT 从站都会以 “on the fly” 的方式读取寻址到该设备的数据,并将其需要交换的数据插入到继续向下游传送的帧中;现在,所有这一切都以 1 Gbit/s 或 10 Gbit/s 的速率进行。硬件产生的延迟是造成报文处理延迟的唯一因素。在子网段中的最后一个设备或者末端分支识别到开放端口时,利用以太网物理层的全双工特性将报文传送回主站。
EtherCAT G 和 EtherCAT G10 仍然保持 EtherCAT 的所有特性。带有三个或者四个端口的设备( 拓扑扩展模块)方便用户灵活配置网络拓扑,并完全满足设备结构的需求。可选的机器模块可通过热连接功能接入系统或者从系统中移除。网络诊断功能可以缩短设备的停机时间并提高可用性。内置的分布式时钟仍可确保设备小于 100 ns 的高精确同步性能。
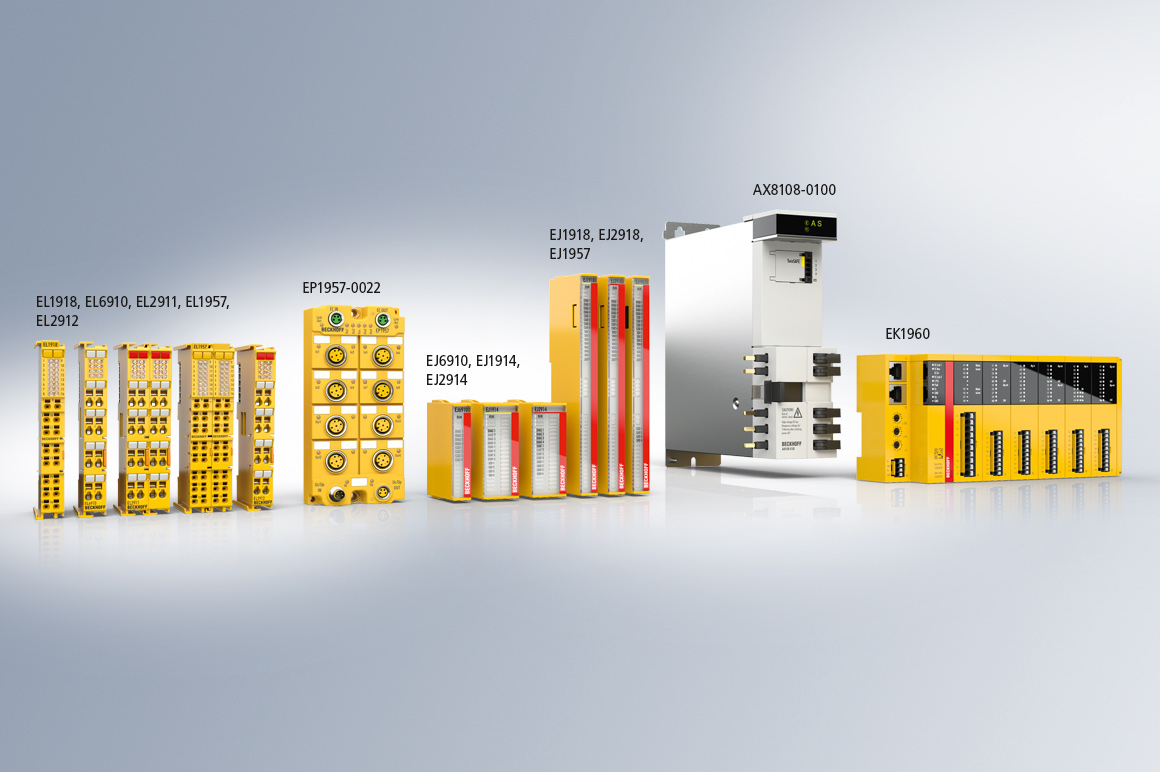
TwinSAFE 将安全技术无缝集成到控制器中
倍福的 TwinSAFE安全解决方案在软件和硬件上都具有可扩展性,能够满足设备自动化所有方面的安全要求。由于 TwinSAFE 端子模块采用模块化设计,具有很好的通用性,因此它们能够无缝集成到倍福控制系统中。倍福的 I/O 家族有总线端子模块、EtherCAT 端子模块、EtherCAT插拔式模块和 EtherCAT 端子盒等外形各异的产品系列可选,满足 EN 61508:2010 标准中规定的 SIL 3 安全等级以及 EN ISO 13849-1:2016-06 标准中规定的 Cat 4/PLe 安全等级。
在驱动技术领域,几乎不再会有无安全功能的解决方案。因此,倍福很早就在其驱动解决方案中集成了 TwinSAFE 运动控制功能,包括标准和紧凑型驱动产品。
它们能够通过标准总线系统传输安全相关的信号,在规划、安装、操作、维护、诊断及成本等方面具有巨大的优势。安全应用程序在 TwinCAT 自动化软件中进行组态或编程,然后通过现场总线传输给 TwinSAFE 逻辑组件。TwinSAFE 逻辑组件是 TwinSAFE 安全系统的核心。系统中的所有安全设备都与逻辑组件通讯。使用 TwinSAFE SC 技术(TwinSAFE 单通道技术)可以利用标准信号实现任何现场总线网段中的安全任务。为此,倍福通过 TwinSAFE SC 功能给具有诸如模拟量输入、角度/位置测量或通讯(4...20 mA、增量编码器、IO-Link 等)功能的 EtherCAT I/O 进行了扩展,同时保留了 I/O 组件的典型信号特性和标准功能TwinSAFE SC I/O 与标准 I/O 在外观上的不同之处在于,它的外壳表面有黄色条纹。
倍福针对搬运、装配以及机器人技术领域的产品亮点

可满足所有性能等级需求的 DIN 导轨安装式模块化工业 PC
随着 CX 系列嵌入式控制器的推出,倍福将 PC 技术和 I/O 级模块化技术相结合,构成一款结构紧凑的 DIN 导轨安装式工业控制器。嵌入式控制性能具有可扩展性,非常适合用于实现所有性能等级的控制任务。作为标准产品,倍福的各款 I/O 系列端子模块可以直接插接到每台嵌入式控制器的右侧,根据任务进行组装。端子模块可以简单地插接到嵌入式控制器中;通过插拔式卡口连接到位,即可建立通讯,无需进一步操作。由于嵌入式控制器可与 I/O 层直连,因此省去了额外的耦合器费用,并减少了布线工作。嵌入式控制器的紧凑型结构可以减小控制柜和端子盒体积,提高成本效益。


用于机器人和装配单元的可扩展驱动技术
近年来,生产设备和机器人制造单元领域对驱动技术的需求迅猛增长。比如在过去,手轮机构或气动驱动装置可以用于产品规格修改或小型定位任务,但这些解决方案对于今天的生产操作来说缺乏灵活性,而且气动轴成本也非常高昂。步进电机或伺服驱动器正逐步取代它们的地位。不同的应用对设备采用的驱动技术提出不同的要求,但不变的是对高精度和高速度的需求。
倍福的可扩展驱动解决方案的应用范围覆盖面广泛:从直流电机或步进电机以及紧凑型伺服电机端子模块,到 AX5000 和 AX8000 系列高性能伺服驱动器。它们在设计和性能上具有精确的可扩展性,能够为旋转应用实施优秀的驱动解决方案。XTS 磁悬浮输送系统和 XPlanar 平面磁悬浮输送系统为驱动技术领域树立了新标杆,开辟出了全新的、更广阔的应用场景。EtherCAT 出色的性能使其能够与基于 PC 的控制技术理想结合,并支持与其它通讯系统之间的连接。倍福的 TwinCAT 运动功能块,可以轻松实现运动学和高精度定位任务。
在机器人应用和搬运设备中,各个轴必须能够相互独立地运行或彼此之间做相对运动,并以高动态方式移动。AX5000 系列伺服驱动和 AX8000 系列多轴伺服系统的集成式高速控制技术专为实现这些复杂的控制任务而设计。灵活的单通道或双通道轴模块设计以及可变的电机功率分配提供了一个成本优化解决方案,特别是对于搬运系统。AM8000 系列伺服电机配备的单电缆技术将动力和传感器线缆整合在一根标准的电机电缆中,从而显著节省安装空间,降低调试成本。此外,倍福的驱动产品系列还集成了安全技术,能够满足较高的设备安全要求,并方便了各种应用中的控制器配置。


XTS 和 XPlanar 智能产品输送系统
倍福的 XTS 磁悬浮输送系统是一款具有高可靠性和高性能的驱动解决方案,系统中的磁力驱动动子沿着全集成式电机模块构成的路径移动。一台安装有 TwinCAT 自动化软件的工业 PC 可以独立控制运动特性各不相同的动子。这样的一套系统可为用户带来的好处不胜枚举。由于 XTS 电机模块中包含了功率电子元器件和位移测量元件,而且动子完全无需拖链,因此输送系统在组装完成后即可立即投入使用。由于电机模块的几何形状不同,可以根据应用需要创建一个开放或者封闭的移动路径,并且可以通过单独的轨道布局减少设备的占地面积。XTS 不仅取代了传统的机械输送带,而且实现了创新的机械设计。通过灵活的运动曲线,可以实现从简单到复杂的过程,从而优化整个制造过程。
XPlanar 平面磁悬浮输送统是一款集传统输送技术诸多优点于一身的平面磁悬浮产品输送系统,可为一台设备内以及几台设备之间处理产品提供各种全新的选择。与自动导引车系统类似,用户可以从物料小车(动子)的自由运动中获益:可以通过任何路线将工件输送到任何地点。XPlanar 将这种灵活性与传统直线电机的高动态性完美结合,并通过优化各个生产工序之间节拍带来附加值。XPlanar 系统将机器人技术领域中为人们所熟悉的自由度和高精度应用于产品输送,因此可以显著简化各个生产步骤。在加工过程中产品定位的概念应用于运输系统。动子托盘可以悬浮运动,无需使用机械导轨,从而大大降低了清洁和维护成本。


模块化设计理念可以显著提高灵活性并节省空间
AMP8000 分布式伺服驱动系统将伺服驱动器直接集成到伺服电机中,结构非常紧凑。由于功率电子元器件可以直接移放到设备上,因此控制柜内所需的空间可以减小到只要够装一个耦合模块(AX8830)即可,通过一个配电模块(AMP8800)即可使用一根电缆为多个伺服驱动器供电。这样可以减少设备的占地面积,为实现模块化设备方案开辟了新的可能性。材料成本显著降低,设备安装工作量和安装时间也显著减少,因此安装时的出错可能性也大大降低。由于无需使用单独的电源,传感器和执行器的体积变得更小,拖链、控制柜以及设备自身所需的空间也相应减小。而现在有了 AMP8620 电源模块后,则完全不再需要控制柜,因此也完全省去了与控制柜的连接。
EtherCAT 端子盒 EP7402 集成有电机接口,用于直接连接 24 V 直流辊筒电机或其它 BLDC 电机,并可以独立于输送机或电机制造商全面控制辊筒电机。

TwinCAT 将所有开发环境和 Runtime 过程都集成在一个中央软件平台上
TwinCAT 是用于开发设计、控制、测量技术、机器视觉、诊断及分析功能(如机器学习)的集成式平台。它支持所有常用的现场总线系统和软件协议,确保从 IT 层到现场层的集成通讯。TwinCAT 支持 IEC 61131-3、C/C++ 和链接至 MATLAB®/Simulink® 的开放式接口,可以为每项任务提供合适的编程语言。大量符合 PLCopen 运动控制标准的 PLC 功能库使得编程更加方便。TwinCAT 3 的多核和众核控制能力也显著提高了性能:例如,它能够实施大量数据分析、图像处理和机器人应用程序,不会给控制性能带来负面影响。
- 机器人和运动控制功能可以基于 TwinCAT NC PTP(点到点轴定位)或 NC I (三维轴插补)在同一个平台上同步。所有 NC 功能,如“凸轮盘”或“飞锯”都可在一个通用的硬件和软件平台上根据需要结合使用。TwinCAT 可以用标准的 PLC 编程语言编写几乎所有机器人运动学功能库。这样可确保提供工程效率,显著降低工程成本。由于能够将 C 和 C++ 代码集成到 TwinCAT 3 中,因此确保可以自主开发自有的机器人运动学功能并集成到整个系统中;MATLAB®/Simulink® 可以在实施控制器时简单地使用现有的模型。
- 成熟的 TwinSAFE 安全技术可以简化安全相关的复杂系统的实施工作;变量可以在软件中轻松映射。例如,这样就可以逐个模块地开发和调试生产单元。
- 基于 Web 的集成式 TwinCAT HMI 可视化解决方案可以方便地开发和维护可视化对象和用户界面。信息在设备上或通过互联网在网络浏览器中显示。
- TwinCAT Vision 将图像处理功能集成控制平台中。这样,用户能够在熟悉的 TwinCAT 环境中进行配置和编程,从而显著简化开发工作。它们还能够实时同步与图像处理相关的所有控制功能,消除延迟,并实时执行图像处理算法。
- TwinCAT IoT 支持用于云应用程序的标准化通讯协议,让您能够在云中或生产设备本地整合数据。
- 采集到的数据可以借助 TwinCAT Analytics 软件进行分析。
- 有了 TwinCAT 云端工程平台,用户可以直接在云端使用已有的 TwinCAT 项目软件和运行核产品。
- TwinCAT 与机器学习算法连接的接口允许使用传统控制环境的所有方法。

TwinCAT 为所有常用的机器人运动控制提供软件支持
TwinCAT 运动学变换功能库将机器人控制器集成到标准自动化软件中,因此 PLC、运动控制、机器人技术都能够在同一台工业 PC 上执行。所有编程配置都在 TwinCAT 中完成,显著了减少开发时间和成本。除了直角坐标运动、二维串联运动、二维并联运动和 3D Delta 运动之外,也可以提供六轴运动。所需的运动学功能可在 TwiCAT System Manager 中方便地选择和参数化。运动学通道被用来设置机器类型(例如 Delta 或 SCARA)、臂长和偏移量等参数。可为动态预控制指定质量和质量惯量。除此之外,这一 TwinCAT 软件库包含用于同步机器人与运动物体的跟踪功能,从而让它能够,例如从传输带或倾斜转盘上拾取工件。
将机器人运动学无缝集成到控制系统内不仅能够省去使用额外的机器人 CPU,还可以借助 PLC 和现有的运动控制功能实现高效交互和同步:直接连接取代了不同控制器和系统之间的复杂及无效通讯。这样可以提高性能和系统精度。
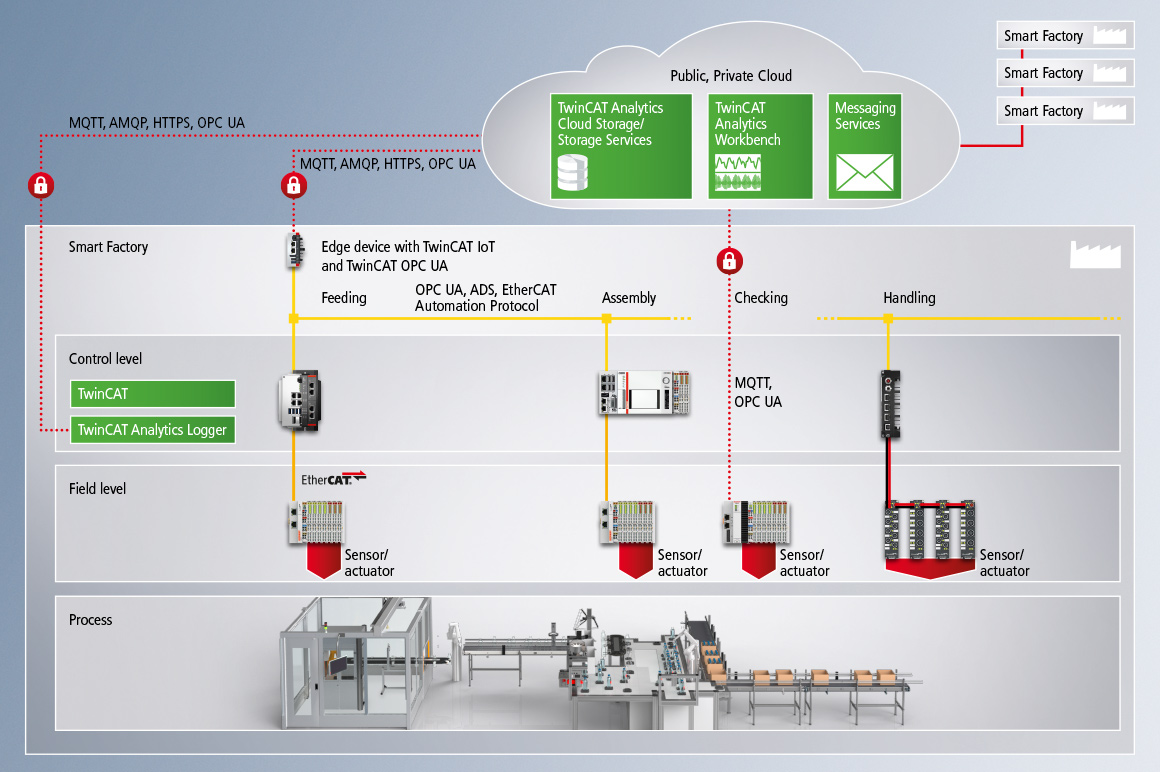
从传感器到云端:基于 PC 的控制技术助力实现物联网和工业 4.0
倍福开发的 TwinCAT IoT 软件库确保设备控制器及基于云的服务之间的安全通讯。它支持 OPC UA、AMQP 及 MQTT 和HTTPS等标准化协议,用于与如 Microsoft Azure™、Amazon Web Services 等常用公有云系统以及公司内网的私有云系统通信。TwinCAT IoT 软件配置快速、简单,与一台用作 IoT 控制器的嵌入式控制器一起,TwinCAT IoT 能够无缝连接物联网和服务互联网。内置安全机制可防止未经授权的访问造成数据滥用,进一步保护企业的知识产权。TwinCAT Analytics 可以周期性地无缝记录和同步分析过程数据,以便用于诸如预测性维护和设备优化等应用,这样,使用适当的分析工具就可以从存储的数据中得出所有所需的信息,优化设备能效或工艺流程。事后分析、零星错误的诊断、质量损失的早期检测和生产瓶颈的检测有助于提高设备的可靠性和可用性。数据分析还可为制造商提供有关其设备运行性能的大量信息,可用于未来的设计和生产过程,从而降低成本并实现理想的设备布局。
然而,倍福技术也支持对现有的机器和设备进行改造。倍福有各种硬件和软件产品可以用于实现此目标,如带 OPC UA 接口的 C6015 超紧凑型工业 PC,可以安装到现有的控制柜中,实现云连接。视具体的应用,该解决方案还可以用作边缘设备进行数据的预处理、压缩和传输。IoT 总线耦合器 EK9160 可用于直接采集数字量或模拟量过程值。它特别适用于设备的翻新改造,并可以使用预配置的网络访问通过 MQTT 或 OPC UA 将数据简单地传输到更高级别的系统中。

C6015 高性能物联网边缘控制设备可以助力老旧设备升级改造
为工业 4.0 或物联网量身定制的现代工厂方案在处理效率、成本和质量方面都具备诸多优势。倍福自动化平台已经集成 OPC UA 接口,可以实现设备与主控计算机之间的标准化通讯,确保云端安全数据传输。用户可以使用 C6015 超紧凑型工业 PC 升级改造老旧设备,以满足数字化工厂要求。它是一款体积小巧、性能强大的物联网边缘设备,可以压缩和采集数据。
由于现场设备通常安装空间都很宝贵,无法安装额外的控制组件,倍福为此特别推出了防护等级高达 IP65/67 的 C70xx 系列超紧凑型工业 PC。C7015 可以直接安装在设备外部,它可以使用 EtherCAT P 接口和 EtherCAT P 端子盒读取传感器数据,例如状态监测传感器。这样就可以通过标准化的云端访问方便、快捷地改造现有系统。

机器学习可应用于所有自动化领域
倍福现在也可以提供机器学习(ML)解决方案,它能够无缝集成到 TwinCAT 3 中。该款解决方案基于成熟的标准,让机器学习应用领域也能享受基于 PC 的控制系统的开放性优势。此外,TwinCAT 解决方案还支持实时机器学习,能够处理运动控制等要求更严苛的任务。这些功能为设备制造商提升设备性能提供了基础。
机器学习的基本思想是不再遵循经典的工程路线,即为特定任务设计解决方案,然后将这些解决方案转化为算法,而是能够从模型过程数据中学习所需的算法。倍福可为整个数据流通和基于数据的算法及部署提供一个闭环工作流。对于所有这些应用场景,都有大量成熟的 TwinCAT 产品可供选择,如 TwinCAT 3 Database Server、Scope Server 或 IoT Data Agent。需要学习的模型可以在如 PyTorch、TensorFlowS、SciKit-Learn 及 MATLAB® 等成熟的机器学习框架中进行训练。然后,训练好的模型可以通过标准格式(ONNX,开放式神经网络交换)导入至 TwinCAT 编程软件中。
在自动化技术方面,这样可以为许多领域开辟新的可能性和优化潜力,包括预测性维护和过程控制、异常检测、协作机器人、全自动质量控制及机器优化。